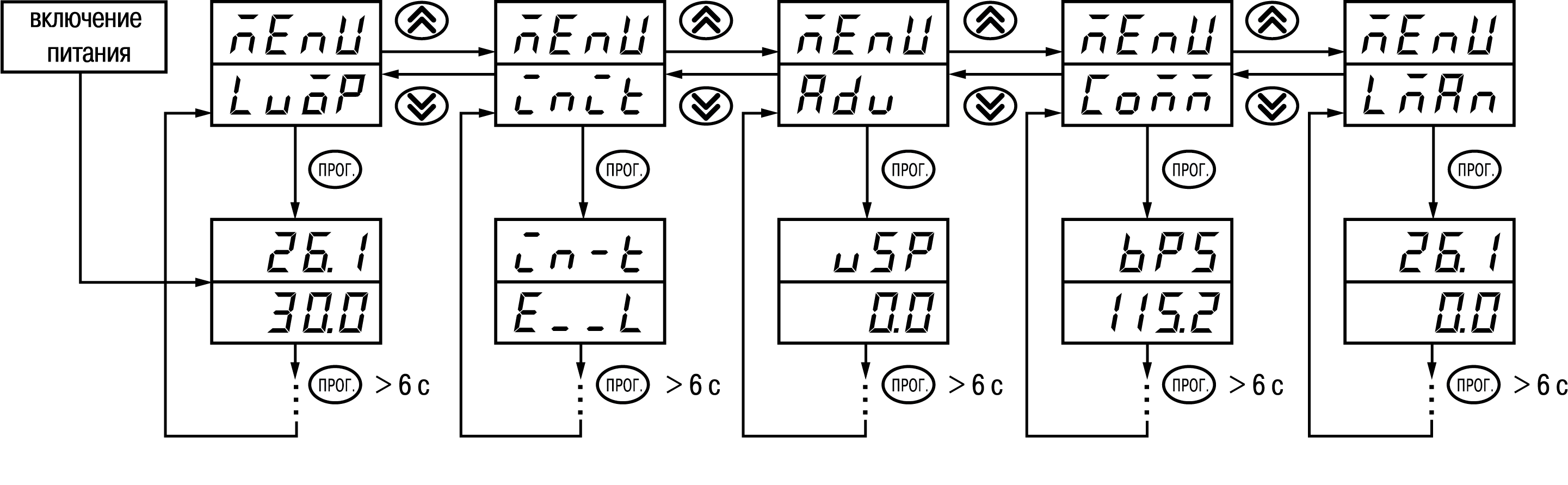
Последовательность настройки
Настройка прибора предназначена для задания и записи настраиваемых параметров в энергонезависимую память прибора.
Для доступа к параметрам настройки следует нажать и удерживать
кнопку  в течение 3 секунд.
в течение 3 секунд.
Если в течение 20 секунд при настройке не производится операций с кнопками, прибор автоматически возвращается к работе.
Основные параметры прибора объединены в меню, которое состоит из следующих групп:
- LVOP – уставки логических устройств, управление запуском регулирования и включением автонастройки;
- AdV – дополнительные настройки регулятора;
- init – настройка входов прибора, ВУ, устройств сигнализации;
- LMAN – параметры ручного управления ПИД-регулятором;
- COMM – настройка интерфейса RS-485.
 , т. е. при переходе к следующему
параметру.
, т. е. при переходе к следующему
параметру.В приборе существует группа служебных параметров. Для перехода в группу следует выполнить действия:
- Нажать комбинацию кнопок +
 +
+  и удерживать не менее 3 секунд.
и удерживать не менее 3 секунд. - После того, как на цифровом индикаторе высветится сообщение
 , ввести код 100 с помощью
кнопок и нажать .
, ввести код 100 с помощью
кнопок и нажать .
Установка параметров входа
Параметры входа прибора настраиваются в меню init.
Код типа датчика
Код типа датчика настраивается в параметре in-t. Перечень кодов приведен в Приложении А.
Установка точности вывода температуры
В случае использования ТС и ТП можно установить желаемую точность отображения измеренной температуры на цифровом индикаторе. Для этого следует задать параметр dPT.
Во время работы с температурами выше 1000 °С рекомендуется устанавливать значение параметра равное 0, с температурами ниже 1000 °С – равное 1 (отображение значения температуры на индикаторе с точностью до 0,1 °С).
Установка диапазона измерения
В случае использования датчиков с унифицированным выходным сигналом тока или напряжения следует провести настройку диапазона измерения, задав значения параметров:
- dP – положение десятичной точки;
- in-L – нижняя граница диапазона измерения;
- in-H – верхняя граница диапазона измерения.
Диапазон измерения задается в соответствии с диапазоном работы применяемого датчика.
Прибор осуществляет линейное преобразование входной величины в реальную физическую величину в соответствии с заданным диапазоном измерения по формуле:

для любых соотношениях ПВ и ПН, где IX – значение сигнала с датчика в относительных единицах диапазона от 0 до 1,000;
- ПН – заданное значение нижней границы диапазона измерения (in-L);
- ПВ – заданное значение верхней границы диапазона измерения (in-H).
Параметр «нижняя граница диапазона измерения» определяет, какое значение измеряемой величины будет выводиться на цифровом индикаторе при минимальном уровне сигнала с датчика (например, 4 мА для датчика с выходным сигналом тока 4...20 мА).
Параметр «верхняя граница диапазона измерения» определяет, какое значение измеряемой величины будет выводиться на цифровом индикаторе при максимальном уровне сигнала с датчика (например, 20 мА для датчика с выходным сигналом тока 4...20 мА или 1 В для датчика с выходным сигналом напряжения 0...1 В).
Параметр «положение десятичной точки» определяет количество знаков после запятой, которое будет выводиться на цифровом индикаторе.
Параметры IN-L, in-H могут принимать любые значения, в том числе in-L > in-H:
- от минус 1999 до 9999 при dP = 0;
- от минус 199.9 до 999.9 при dP = 1;
- от минус 19.99 до 99.99 при dP = 2;
- от минус 1.999 до 9.999 при dP = 3.
Значение параметра dP влияет на отображение измеренной величины. Для каждого типа датчика может быть установлено свое значение этого параметра, которое будет сохранено в памяти прибора. Поэтому при переходе от датчиков с унифицированными сигналами со своим установленным значением (например, dP = 0, 2 или 3) к датчикам ТС и ТП, у которых по умолчанию dP = 1, и наоборот, значение положения десятичной точки автоматически изменяется. Это может привести к изменению значения уставки и других параметров, имеющих одни и те же единицы измерения, что и измеряемая величина.
Для получения более высокой разрешающей способности следует устанавливать большее значение dP. Например, во время использования датчика давления с диапазоном 0–15 атмосфер и выходным сигналом тока 0...20 мА наилучшие результаты могут быть получены со следующими значениями параметров: in-L = 0,00 и in-H = 15,00 при dP = 2.
Коррекция измерительной характеристики датчика
Измеренное прибором значение следует откорректировать для устранения начальной погрешности преобразования входных сигналов и погрешностей, вносимых соединительными проводами. В приборе есть два типа коррекции, позволяющие осуществлять сдвиг или наклон характеристики на заданную величину.
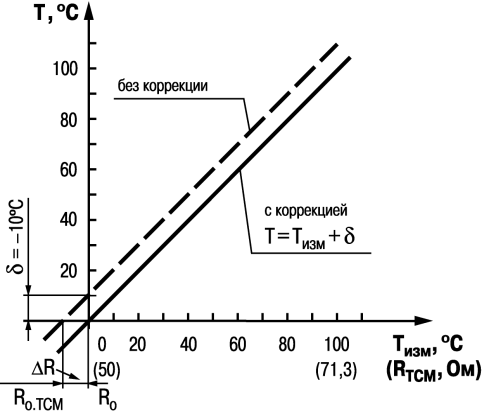
Сдвиг характеристики применяется:
- для компенсации погрешностей, вносимых сопротивлением подводящих проводов в случае использования двухпроводной схемы подключения ТС;
- в случае отклонения у ТС значения R0.
Такая коррекция осуществляется путем прибавления к измеренной величине значения δ.
Значение δ задается параметром SH.
Пример сдвига характеристики для датчика TCM (Cu50) графически представлен на рисунке.
Параметр SH допускается изменять в диапазоне от минус 50,0 до +50,0 °С для температурных датчиков (ТС и ТП), от минус 500 до +500 °С — для датчиков с унифицированным сигналом тока или напряжения.
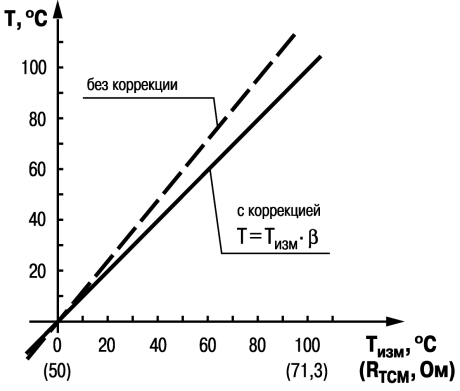
Наклон характеристики изменяется путем умножения измеренной (и скорректированной «сдвигом», если эта коррекция необходима) величины на поправочный коэффициент β. Значение β задается параметром KU.
Пример изменения наклона измерительной характеристики графически представлен на рисунке.
Данный вид коррекции используется, как правило, для компенсации погрешностей самих датчиков (например, в случае отклонения у ТС параметра α от стандартного значения) или погрешностей, связанных с разбросом сопротивлений шунтирующих резисторов (при работе с преобразователями, выходным сигналом которых является ток).
Значение поправочного коэффициента β задается в безразмерных единицах в диапазоне от 0,500 до 2,000 и перед установкой определяется по формуле:

где Пфакт – фактическое значение контролируемой входной величины;
Пизм – измеренное прибором значение той же величины.
Определить необходимость введения поправочного коэффициента можно, измерив максимальное или близкое к нему значение параметра, где отклонение наклона измерительной характеристики наиболее заметно.
Установка параметров цифрового фильтра
Для ослабления влияния помех на эксплуатационные характеристики прибора в составе его каналов измерения предусмотрены цифровые фильтры.
Фильтрация настраивается с помощью параметров:
- Fb — полоса цифрового фильтра;
- inF — постоянная времени цифрового фильтра.
- Значение inF допускается устанавливать в диапазоне от 1 до 999 секунд, при inF = OFF фильтрация методом экспоненциального сглаживания отсутствует.
- Значение полосы фильтра устанавливается в диапазоне от 0 до 9999 °С/с. При Fb= 0 «фильтрация единичных помех» отсутствует.
Полоса цифрового фильтра позволяет защитить измерительный тракт от единичных помех и задается в единицах измеряемой величины. Если измеренное значение Ti отличается от предыдущего Ti–1 на величину, большую, чем значение параметра Fb, то прибор присваивает ему значение равное (Ti-1 + Fb), а полоса фильтра удваивается. Таким образом, характеристика сглаживается.
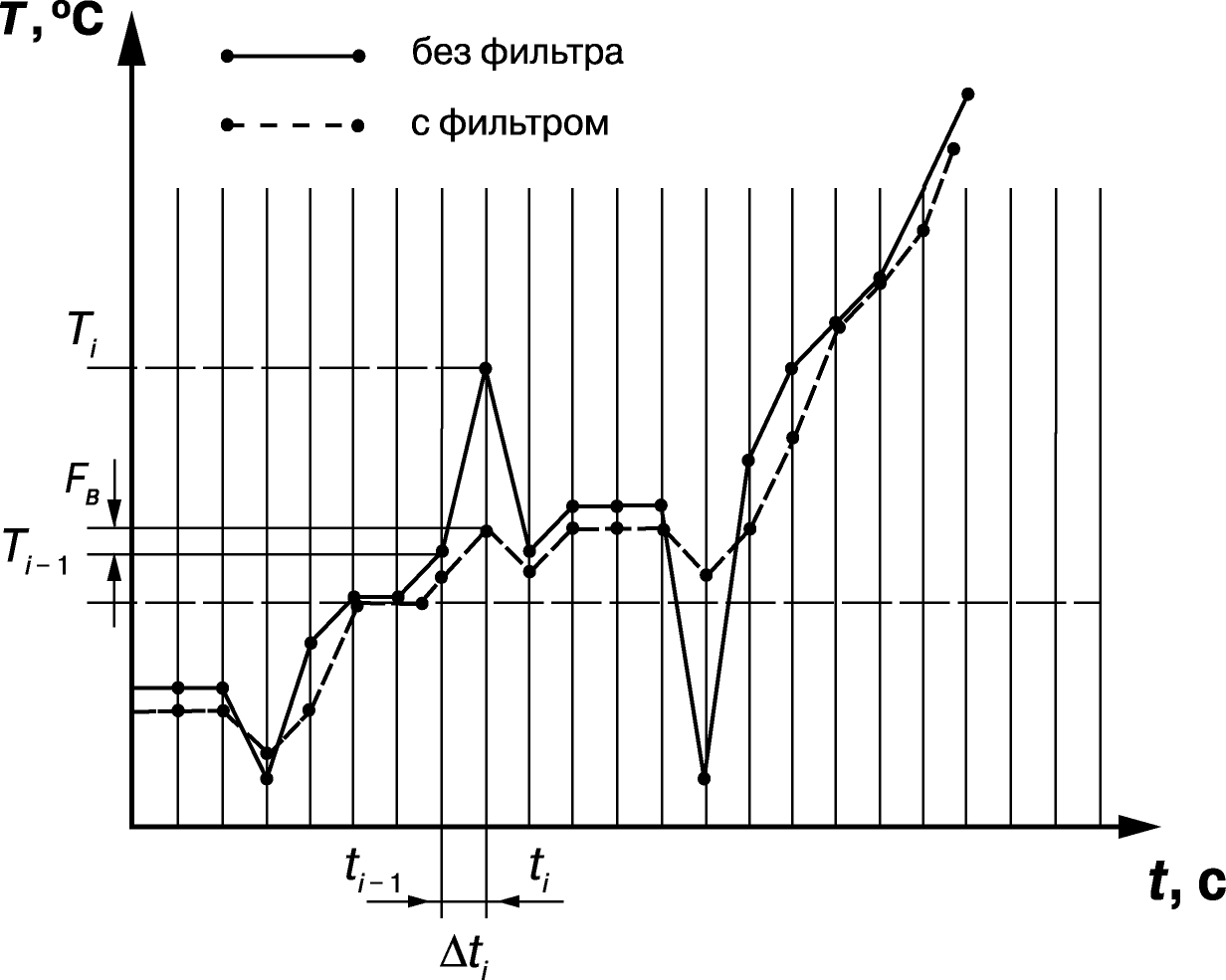
Малая ширина полосы фильтра приводит к замедлению реакции прибора на быстрое изменение входной величины. Поэтому при низком уровне помех или при работе с быстро меняющимися процессами рекомендуется увеличить значение параметра или отключить действие полосы фильтра, установив в параметре Fb = 0. В случае высокого уровня помех следует уменьшить значение параметра для устранения их влияния на работу прибора.
Цифровой фильтр устраняет шумовые составляющие сигнала, осуществляя его экспоненциальное сглаживание. Основной характеристикой экспоненциального фильтра является tф – постоянная времени цифрового фильтра. Параметр inF – интервал, в течение которого сигнал достигает 0,63 от значения каждого измерения Ti.
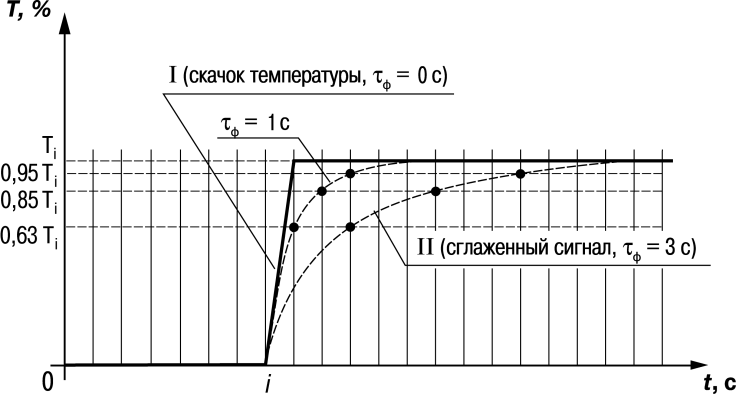
Уменьшение значения tф приводит к ускорению реакции прибора на скачкообразные изменения температуры, но снижает его помехозащищенность. Увеличение tф повышает инерционность прибора и значительно подавляет шумы.
Настройка параметров входа управления (пуск/стоп)
Для определения функций внешнего ключа при дистанционном управлении регулятором следует задать значение параметра EV-1:
- nOnE – дополнительный вход не задействован, замыкание и размыкание ключа не влияет на работу прибора;
- N-O – вход выполняет функцию запуска/остановки регулирования: ключ разомкнут – пуск, ключ замкнут – стоп;
- N-C – вход выполняет функцию запуска/остановки регулирования: ключ замкнут – пуск, ключ разомкнут – стоп.
Установка параметров ЛУ прибора
Настройка диапазона регистрации
При работе в режиме регистратора ЛУ сравнивает входную величину с заданными значениями и выдает на соответствующее выходное устройство аналоговый сигнал в виде тока 4...20 мА, который можно подавать на самописец или другое регистрирующее устройство.
Задание границ диапазона регистрации:
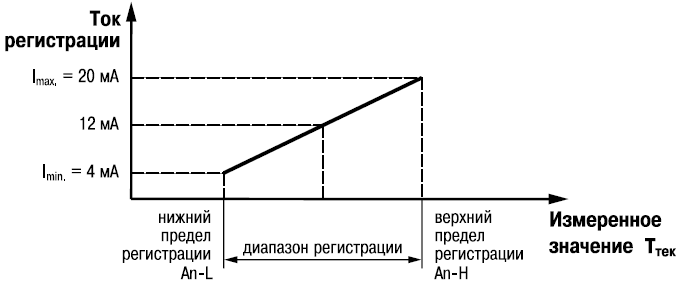
В случае использования аналогового ВУ как регистратора следует определить диапазон работы ВУ путем установки параметров:
- AN-L – нижняя граница диапазона регистрации;
- AN-H – верхняя граница диапазона регистрации.
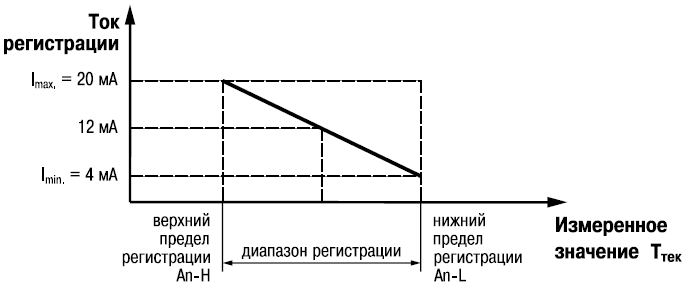
Допускается задавать любые соотношения этих параметров, кроме An-L = An-H, так как на выходе появляется неопределенный сигнал.
Диапазон регистрации всегда задается в единицах измерения входной величины. Для температурных датчиков (ТС и ТП) диапазон значений параметров An-L и An-H определяется диапазоном измерения для НСХ данного датчика. Для датчиков с унифицированным сигналом диапазон значений параметров An-L и An-H определяется установленными значениями параметров in-L и in-H.
Установка параметров процесса регулирования
Задание уставки регулируемой величины
Для изменения уставки следует измененить значение параметра SP. Данный параметр располагается в меню LVOP.
Для изменения уставки следует:
Во время работы прибора нажать кнопку
на нижнем ЦИ появится значение SP.Кнопками
и изменить значение SP не установлена защита доступа и/или изменений. ПримечаниеЗначение SP можно изменить если не установлена защита от изменения параметров (см. раздел).
ПримечаниеЗначение SP можно изменить если не установлена защита от изменения параметров (см. раздел).Нажать кнопку
для
сохранения выбранного значения.
Диапазон значений SP ограничивается параметрами:
- SL-L – нижняя граница диапазона задания уставки;
- SL-H – верхняя граница диапазона задания уставки.
Данные параметры расположены в меню init.
Параметры SL-L,SL-H могут принимать значения от нижней до верхней границы диапазона измерения для используемого датчика.
Для отображения и редактирования десятых долей следует одновременно
нажать + , после чего на ЦИ отобразится
[- - - . 0 ].
Изменение десятых долей осуществляется обычным образом – кнопками или .
Для возврата к целой части следует одновременно нажать кнопки + .
Установка режима регулирования
Прибор может работать в одном из двух режимов – двухпозиционное или ПИД-регулирование.
Установка требуемого режима производится заданием значения параметра CntL:
- Pid – ПИД-регулирование;
- OnOF – двухпозиционное регулирование.
- задания r-S = StoP;
- изменения состояния ключа на дополнительном входе, если задействована соответствующая функция дополнительного входа.
Установка способа управления
Во время регулирования следует выбрать способ управления системой: прямое или обратное управление.
В случае прямого управления значение выходного сигнала регулятора увеличивается с увеличением измеряемой величины. В случае обратного управления значение выходного сигнала регулятора уменьшается с увеличением измеряемой величины. Например, в системе нагревания по мере роста температуры значение выходного сигнала уменьшается, этот процесс имеет обратное управление.
Способ управления выбирается заданием соответствующего значения параметра OREU:
- OR-R – обратное управление, используется для систем нагревания;
- OR-D – прямое управление, используется для систем охлаждения.
Настройка двухпозиционного регулятора
Гистерезис двухпозиционного регулятора HYS (в единицах измеряемой величины) задается в параметре HYSt.
Параметр HYSt допускается изменять в диапазоне от 0,0 до 999,9 °С для температурных датчиков (ТС и ТП), от 0 до 9999 °С для аналоговых.
Прибор в режиме двухпозиционного регулирования работает по одному из представленных на рисунке типов логики:
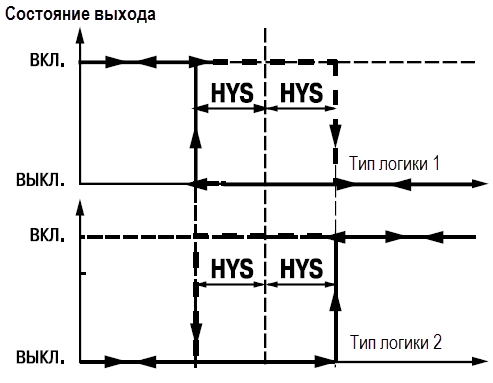
- тип логики 1 (обратное управление) применяется для управления работой нагревателя (например, ТЭН) или сигнализации о том, что значение текущего измерения Ттек меньше уставки Туст. ВУ первоначально включается при значениях Ттек < Туст – HYS, выключается при Ттек > Туст + HYS и вновь включается при Ттек < Туст – HYS, осуществляя тем самым двухпозиционное регулирование по уставке Туст с гистерезисом ± HYS;
- тип логики 2 (прямое управление) применяется для управления работой охладителя (например, вентилятора) или сигнализации о превышении значения уставки. ВУ первоначально включается при значениях Ттек > Туст + HYS, выключается при Ттек < Туст – HYS.
Задание уставки (Туст) и гистерезиса (HYS) производится назначением параметров регулирования прибора.
Настройка ПИД-регулятора
Общие принципы ПИД-регулирования
На выходе регулятора вырабатывается управляющий (выходной) сигнал Yi, действие которого направлено на уменьшение отклонения Ei:

где Xp – полоса пропорциональности (настраиваемый параметр P);
Ei – разность между заданными Tуст и текущими Ti значением измеряемой величины, или рассогласование;
τд – постоянная времени дифференцирования (настраиваемый параметр d — «дифференциальная постоянная ПИД-регулятора»);
ΔEi – разность между двумя соседними измерениями Ei и Ei–1;
Δtизм – время между двумя соседними измерениями Ti и Ti–1;
τи – постоянная времени интегрирования (настраиваемый параметр i — «интегральная постоянная ПИД-регулятора»);
 – накопленная
сумма рассогласований.
– накопленная
сумма рассогласований.
Из формулы видно, что во время ПИД-регулирования сигнал управления зависит от:
- разницы между текущим параметром Ti и заданным значением
Tуст измеряемой величины Ei, которая реагирует
на мгновенную ошибку регулирования (отношения
 );
); - скорости изменения параметра
 , которая позволяет улучшить качество переходного
процесса, выражение
, которая позволяет улучшить качество переходного
процесса, выражение  называется дифференциальной составляющей выходного сигнала;
называется дифференциальной составляющей выходного сигнала; - накопленной ошибки регулирования , которая позволяет добиться максимально быстрого
достижения температуры уставки, выражение
 называется интегральной
составляющей выходного сигнала.
называется интегральной
составляющей выходного сигнала.
Для эффективной работы ПИД-регулятора следует установить правильные для конкретного объекта регулирования значения коэффициентов Xр, τд и τи, которые можно определить в режиме автонастройки или в режиме ручной настройки.
Параметры настройки
Зона нечувствительности
Зона нечувствительности задается в параметре dB. Параметр dB устанавливается в единицах измерения входной величины в диапазоне 0,0...20,0 °С для температурных датчиков (ТС и ТП), 0...200 °С – для аналоговых.
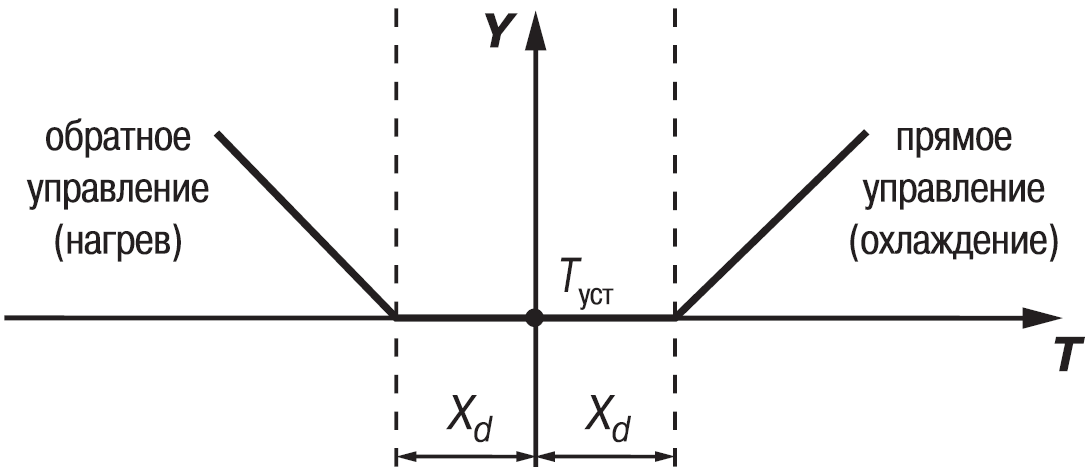
Чтобы исключить излишние срабатывания регулятора при небольшом значении рассогласования Ei, для вычисления Yi используется уточненное значение Ep, вычисленное в соответствии с условиями:
- если |Ei| < Xd, то Ep = 0;
- если Ei > Xd, то Ep = Ei – Xd;
- если Ei < – Xd, то Ep = Ei + Xd,
где Xd – зона нечувствительности.
Тогда прибор будет выдавать управляющий сигнал только после того, как регулируемая величина выйдет из этой зоны. Зона нечувствительности не должна превышать необходимую точность регулирования.
Скорость изменения уставки
Если значение уставки следует изменить в процессе работы, то переход с одного значения на другое можно сгладить, задав «скорость изменения уставки».
Необходимая скорость оперативно задается как значение параметра VSP. Если значение параметра VSP отличается от нуля, уставка меняется не скачком, а по линейному закону с заданной скоростью.
В качестве начальной уставки принимается текущее значение регулируемого параметра на момент включения регулятора, тогда каждую минуту уставка регулятора изменяется на величину, заданную в этом параметре.
В случае использования скорости изменения уставки возрастает время выхода на рабочий режим. Поэтому, если задержка приводит к неудовлетворительным результатам, нужно увеличить значение этого параметра или отключить его действие.
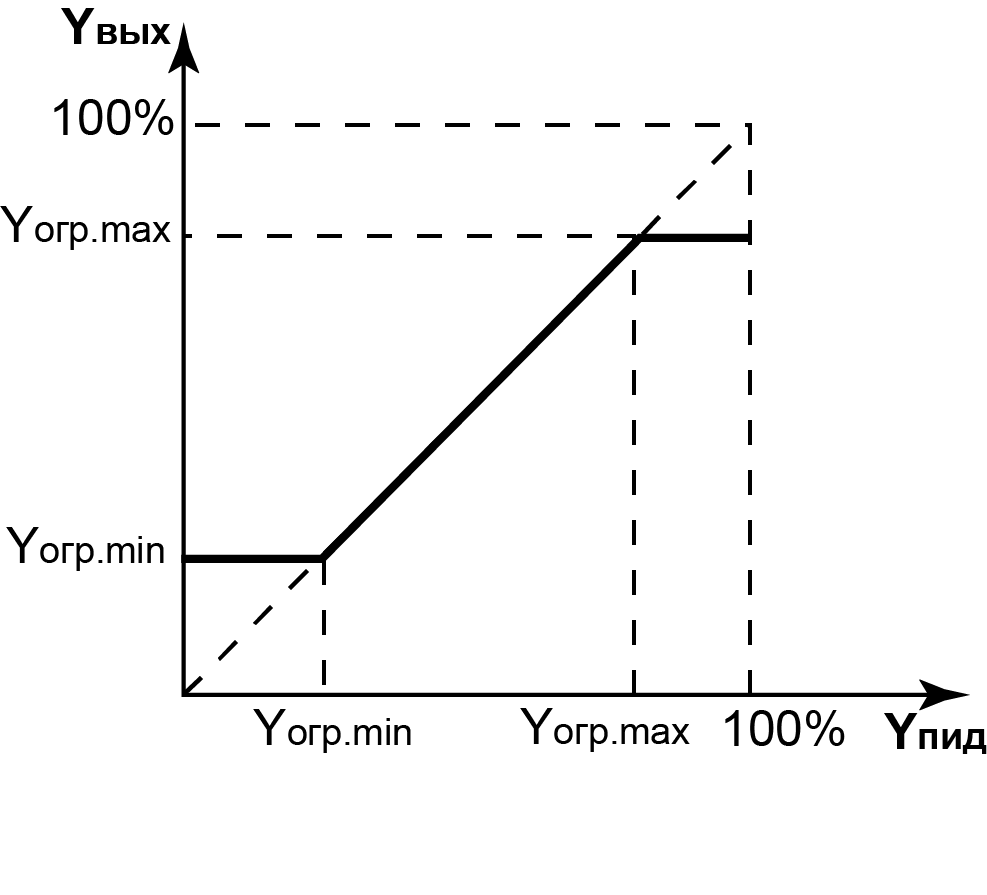
Ограничение выходного сигнала
Выходной сигнал ограничивается параметрами:
- OL-L — ограничение минимального значения выходного сигнала Yогр min;
- OL-H — ограничение максимального значения выходного сигнала Yогр max;
- ORL — ограничение скорости изменения выходного сигнала νогр.
Ограничение минимального значения выходного сигнала Yогр min устанавливается в процентах и может принимать значения от 0 до Yогр max. Если рассчитанное значение выходного сигнала, в том числе в режимах «Ошибка» и «Остановка регулирования», меньше установленного в параметре Yогр min, на выход регулятора будет выдан сигнал Yогр min (%).
Ограничение максимального значения выходного сигнала Yогр max устанавливается в процентах и может принимать значения от Yогр min до 100. Если рассчитанное значение выходного сигнала, в том числе в режимах «Ошибка» и «Остановка регулирования», больше установленного в параметре Yогр max, на выход регулятора будет выдан сигнал Yогр max (%).
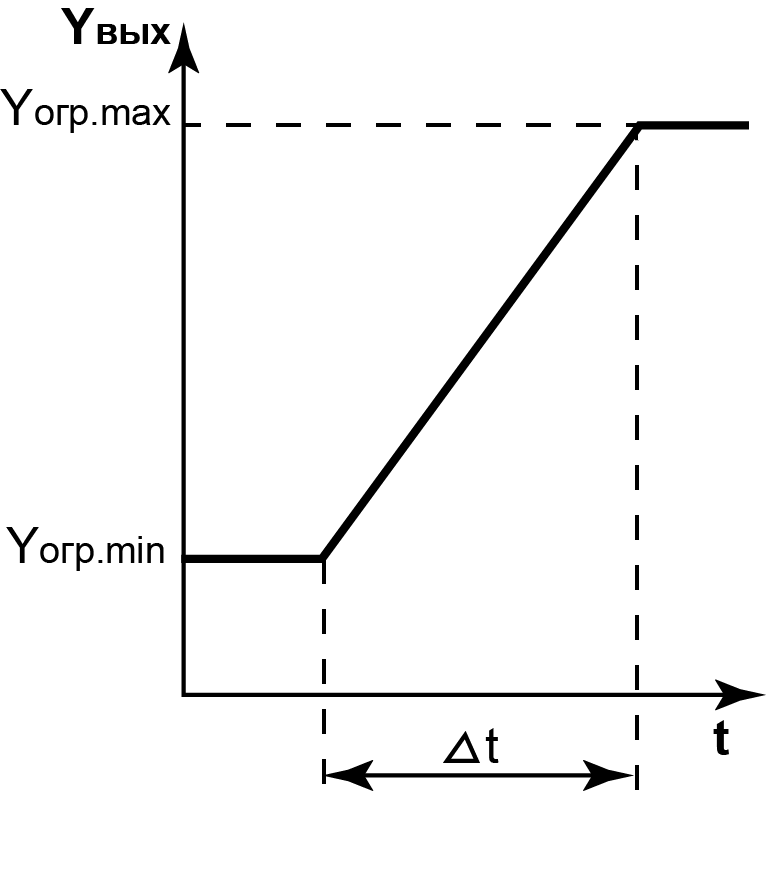
Ограничение скорости изменения выходного сигнала νогр определяет максимальную
допустимую скорость изменения выходного сигнала. Ограничение устанавливается
в процентах в секунду (%/с) и вычисляется по формуле:
Период следования управляющих импульсов
В случае использования ПИД-регулятора с ВУ дискретного типа следует установить период следования управляющих импульсов – параметр CP. При аналоговом управлении значение параметра CP не влияет на работу прибора.
Значение периода следования CP определяется при проведении автонастройки. Параметр CP следует устанавливать в диапазоне 1...250 секунд.
Повышение частоты ускоряет реакцию регулятора на внешние возмущения. В идеале частота импульсов управления должна совпадать с частотой опроса датчика. В случае использования электронных ключей (тиристоров, симисторов) рекомендуется устанавливать CP = 1...2.
Увеличение периода следования управляющих импульсов продлевает срок службы силовых контактов при использовании электромагнитных реле или пускателя, но может ухудшить качество регулирования.
Автонастройка определяет значение CP, которое не будет отрицательно влиять на работу системы.
Установка параметров режима ручного управления ПИД-регулятором
В режим ручного управления можно перейти только при следующей комбинации значений параметров:
- CntL = Pid;
- r-S = rUn (при использовании дополнительного
входа):
- ключ разомкнут для EV-1 = N-O;
- ключ замкнут для EV-1 = N-C.
- At = StOP.
В этом случае появляется группа LMAn.
При переходе к первому параметру группы LMAn прибор устанавливает режим ручного управления, регулятор автоматически отключается, засвечивается светодиод РУЧ. На верхнем цифровом индикаторе отображается значение измеренной величины, на нижнем – устанавливаемое значение выходного сигнала регулятора O-Ed.
Кнопками и можно установить значение O-Ed в диапазоне 0...100 (на значения накладываются
ограничения мощности от OL-L до OL-H). Прибор преобразовывает этот сигнал для управления ВУ1.
Параметр O. – текущее рассчитанное прибором значение выходной мощности, которое может отличаться от значения параметра O-ED из-за действия параметра ORL группы ADV, запрещающего резкое изменение мощности, выдаваемой на ВУ1.
После установки требуемого значения мощности в параметре O-ED, следует перейти к параметру O. и убедиться, что текущая мощность достигла значения, установленного в O-ED.
Если в параметре ORL установлено значение 100, выходная мощность передается на выход мгновенно.
Выход из режима выполняется нажатием и удержанием кнопки на 4–6 секунд.
Установка режима быстрого выхода на уставку
Режим включается заданием RAMP = ON.
Данный режим обеспечивает выход на заданное значение температуры с максимальной скоростью и минимальным перерегулированием.
В начальный момент регулирования прибор работает по закону двухпозиционного регулирования. В случае приближения измеряемой величины к значению уставки прибор начинает работать по ПИД-закону.
Настройка состояния ВУ в режиме «Остановка регулирования»
В режиме двухпозиционного регулирования при остановленном регулировании работа ВУ1 блокируется (переводится в состояние, определенное в параметре ONST).
При остановленном ПИД-регулировании ВУ1 переводится в состояние, определенное в параметре MdST:
- если MdST = O, прибор выдает выходной сигнал, равный последнему (определенному до остановки регулирования) значению выходного сигнала;
- если MdST = MVST, прибор выдает выходной сигнал, равный значению, установленному в параметре MVST.
Настройка состояния ВУ в режиме «Ошибка»
В случае обнаружения какой-либо ошибки прибор прекращает регулирование, и выходной сигнал регулятора принимает значение, определенное в параметре ONEr при двухпозиционном регулировании или в MVER при ПИД-регулировании.
В случае срабатывания устройства обрыва контура выходной сигнал регулятора также принимает значение, определенное параметром ONEr или MVER. Сигнал тревоги выключается установкой значения STOP в параметр r-S. Работа регулятора возобновляется установкой значенияrUn в параметр r-S.
Автонастройка
Автоматическая настройка (автонастройка) предназначена для оптимальной настройки системы регулирования непосредственно на объекте.
Для запуска автонастройки следует:
- Задать уставку регулятора SP.
 ПредупреждениеЗначение задаваемой уставки должно составлять 0,75–0,85 от максимального допустимого значения регулируемой величины для данного технологического процесса.
ПредупреждениеЗначение задаваемой уставки должно составлять 0,75–0,85 от максимального допустимого значения регулируемой величины для данного технологического процесса. - Задать значение rUn в параметре r-S.
- Запустить настройку заданием значения rUn в параметре At, при запуске автонастройки загорается светодиод АН.
Во время автонастройки прибор работает как двухпозиционный регулятор. Система осуществляет колебания, вид которых приведен на рисунке.
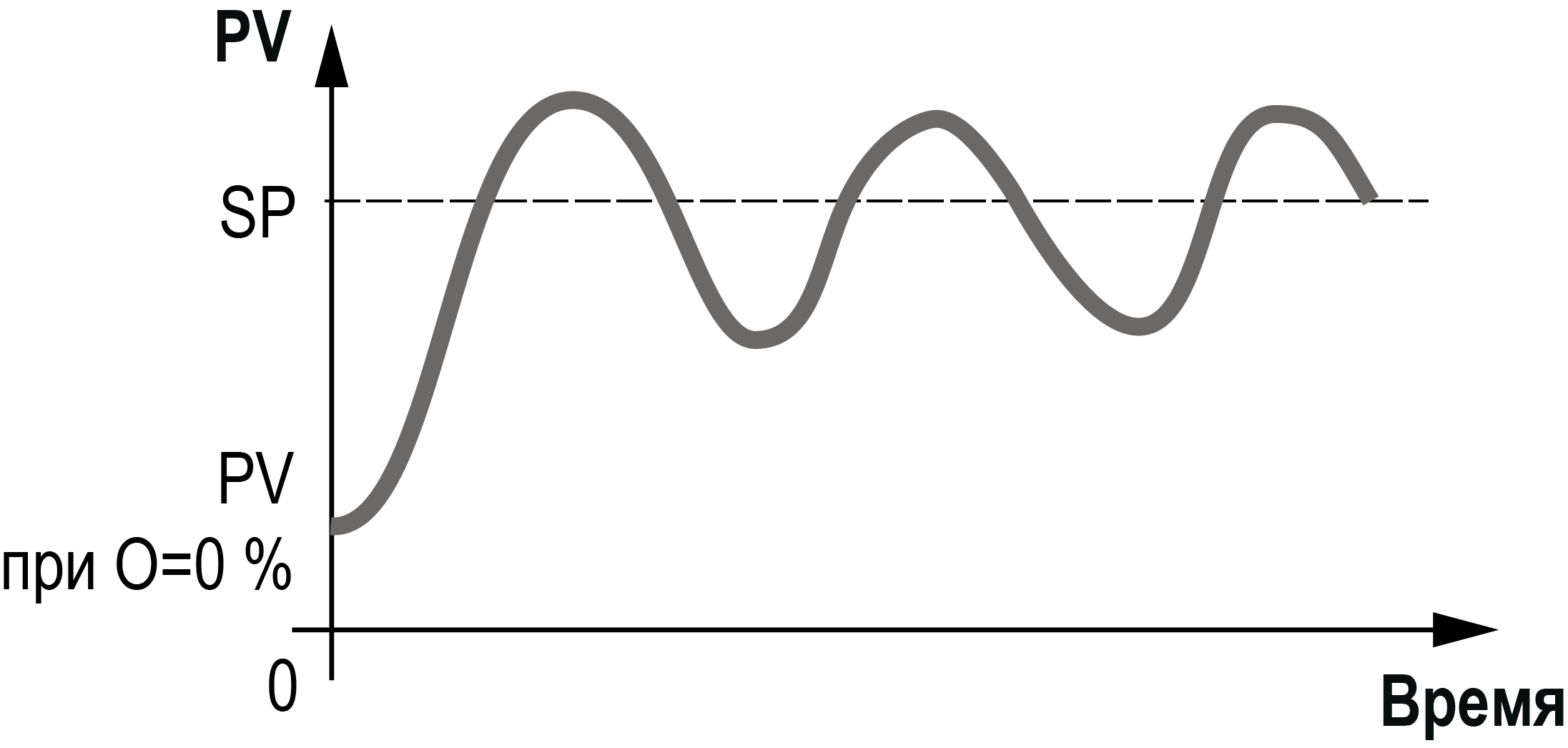
В результате автонастройки прибор вычисляет оптимальные значения коэффициентов ПИД-регулятора (Xp, ͳи, ͳд) для данной системы. Кроме того, происходит определение постоянной времени входного сглаживающего фильтра ͳф, периода следования управляющих импульсов Тсл и рекомендуемое значение параметра RAMP.
После окончания автонастройки светодиод АН гаснет, прибор автоматически переходит к работе. В случае сбоя в процессе автонастройки ее выполнение сразу прекращается, светодиод АН мигает. Поэтому при выполнении автонастройки особое внимание надо уделить защите прибора от различных внешних воздействий и электромагнитных помех, а также устранить нежелательные внешние возмущения на объекте регулирования.
- В режиме автоматической настройки сохраняется возможность для изменения параметров функционирования и смены режима работы прибора. Систематическое использование этой возможности не рекомендуется, так как изменение параметров или режимов нарушает процесс настройки и правильность расчета параметров не гарантируется.
- Следует проявлять осторожность во время использования режима автоматической настройки. Использовать его рекомендуется только тогда, когда допускаются заметные колебания технологического параметра относительно уставки. Если работа в таком режиме недопустима, параметры ПИД-регулятора следует задавать вручную, исходя из информации об инерционных свойствах объекта.
Ручная подстройка ПИД-регулятора
Ручная подстройка осуществляется итерационным методом с оценкой процесса по двум показателям:
- наличию колебаний;
- наличию перехода графика регулируемой величины через уставку.
В ряде случаев данные действия не могут обеспечить качественную настройку ПИД-регуляторов:
- системы с непрогнозируемыми внешними возмущающими воздействиями;
- системы с разнородными нагрузками (например, ГВС днем и вечером).
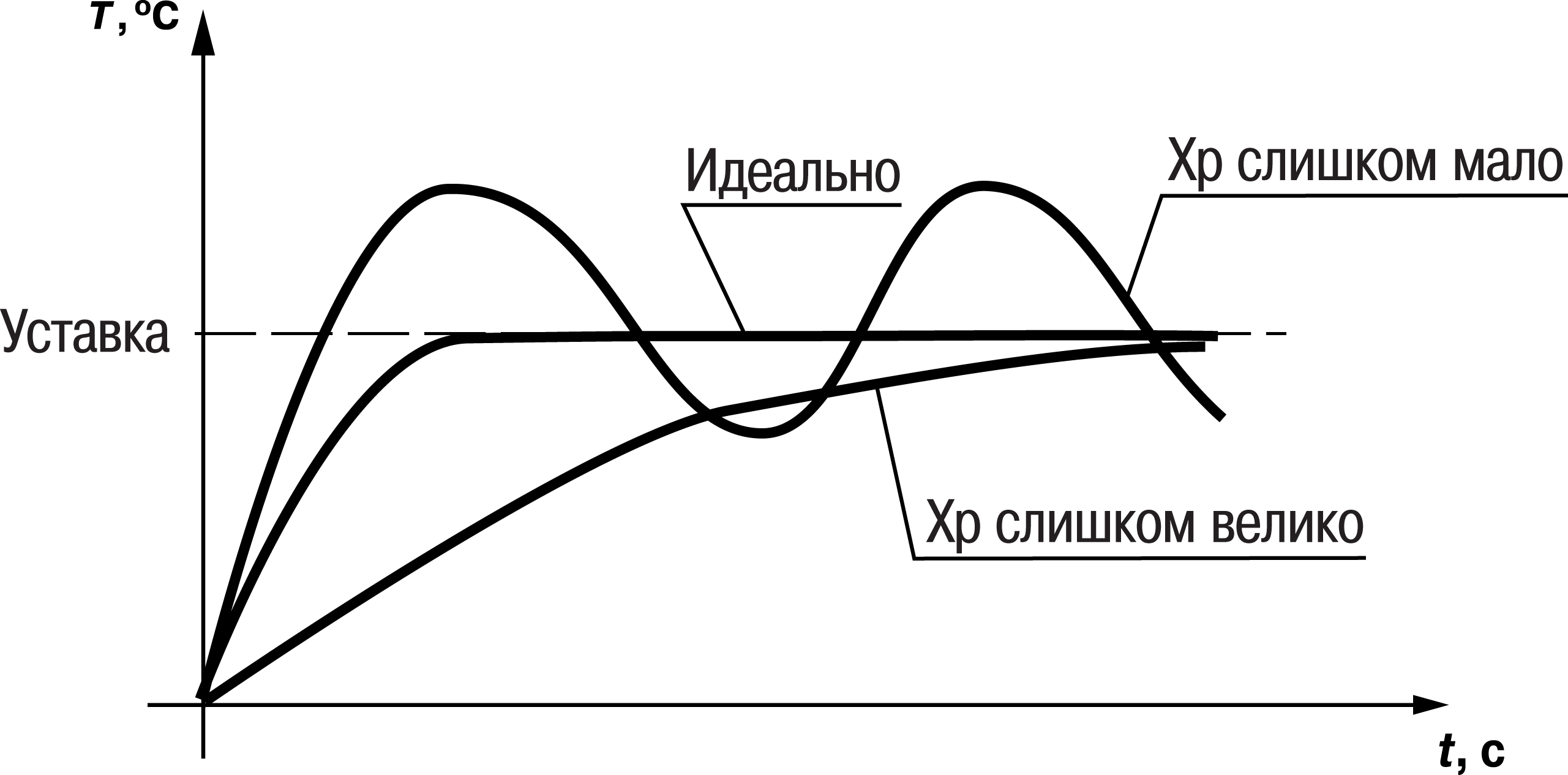
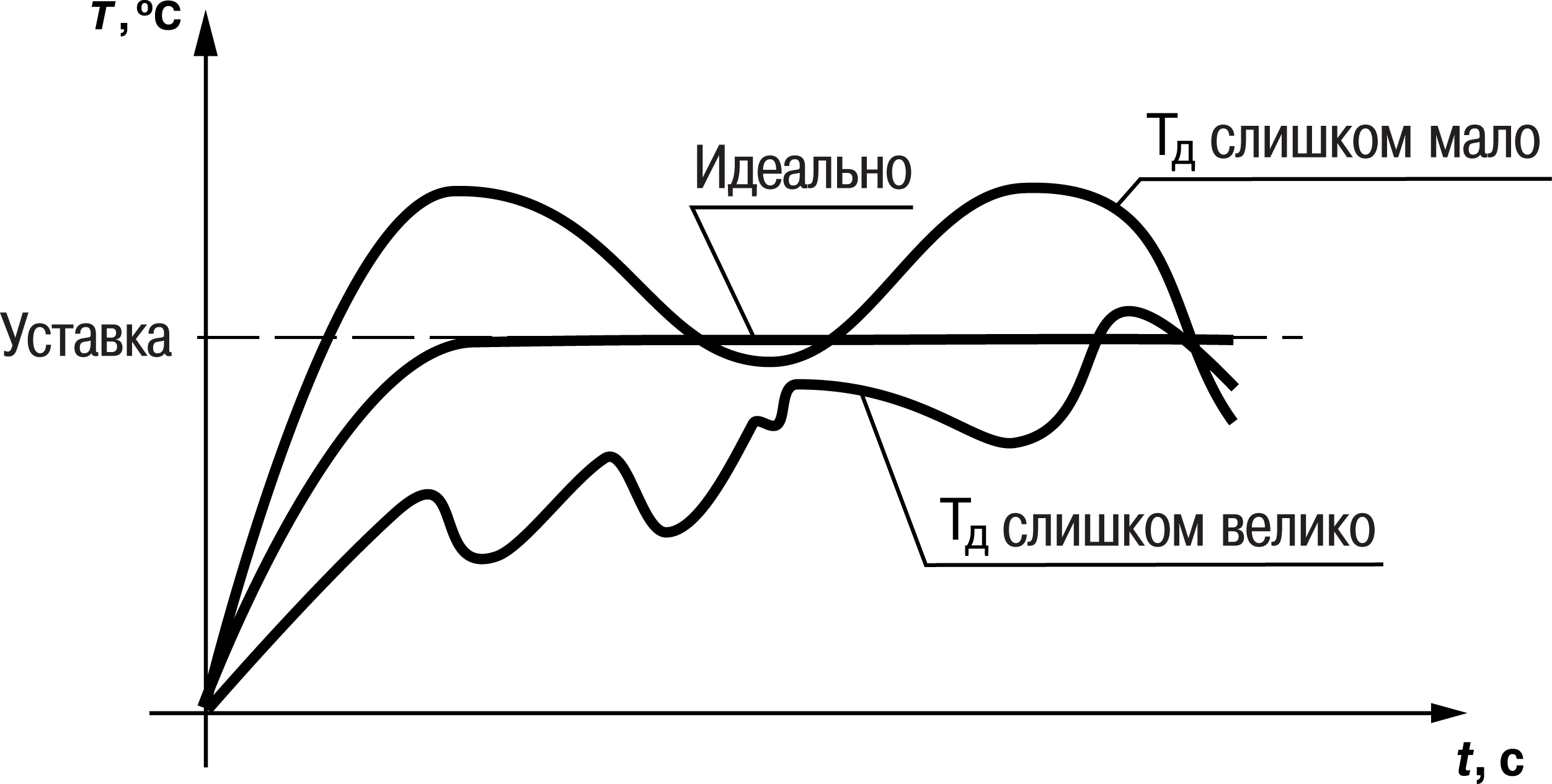
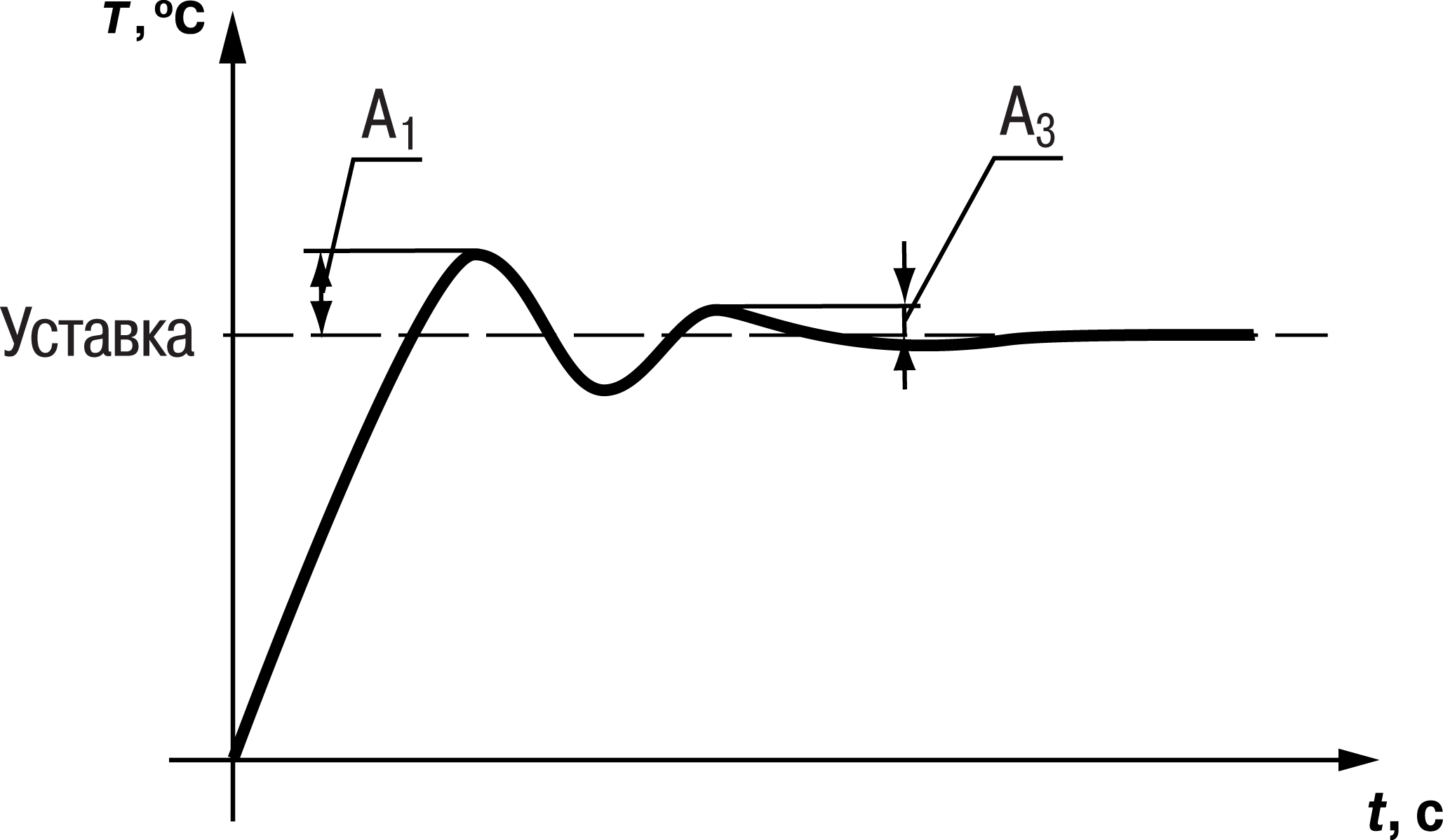
При оптимальной подстройке регулятора график регулируемой величины должен иметь минимальное значение показателя ошибки регулирования (А1) при достаточно степени затухания φ = 1 – А3/А1 (0,8 … 0,9).
Пример ручной настройки ПИД-регулятора
Для настройки ПИД-регулятора следует:
На приборе установить (диапазон параметров приведен в Приложении Настраиваемые параметры) следующие значения:
- ХP = 9999;
- τи = 0;
- τд = 0.
- Задать уставку.
- В ходе наблюдений фиксировать значения регулируемого параметра (скорость и время подхода к уставке).
- В ходе настройки руководствоваться таблицей.
Описание шагов примера
Шаг | Параметры | Оценка процесса | Решение |
|---|---|---|---|
| 1 | ХP = 9999 τи = 0 τд = 0 | Долго подходит к уставке, не пересекает | Уменьшить ХP (в два раза) |
| 2 | ХP = 5000 τи = 0 τд = 0 | Быстрее подходит к уставке, не пересекает | Уменьшить ХP (в два раза) |
| 3 | Сделать несколько итераций, до тех пор, пока появятся признаки колебаний. Измерить период (Тк). Для следующей итерации можно принять τи = Тк / 2 для ускорения процесса настройки | 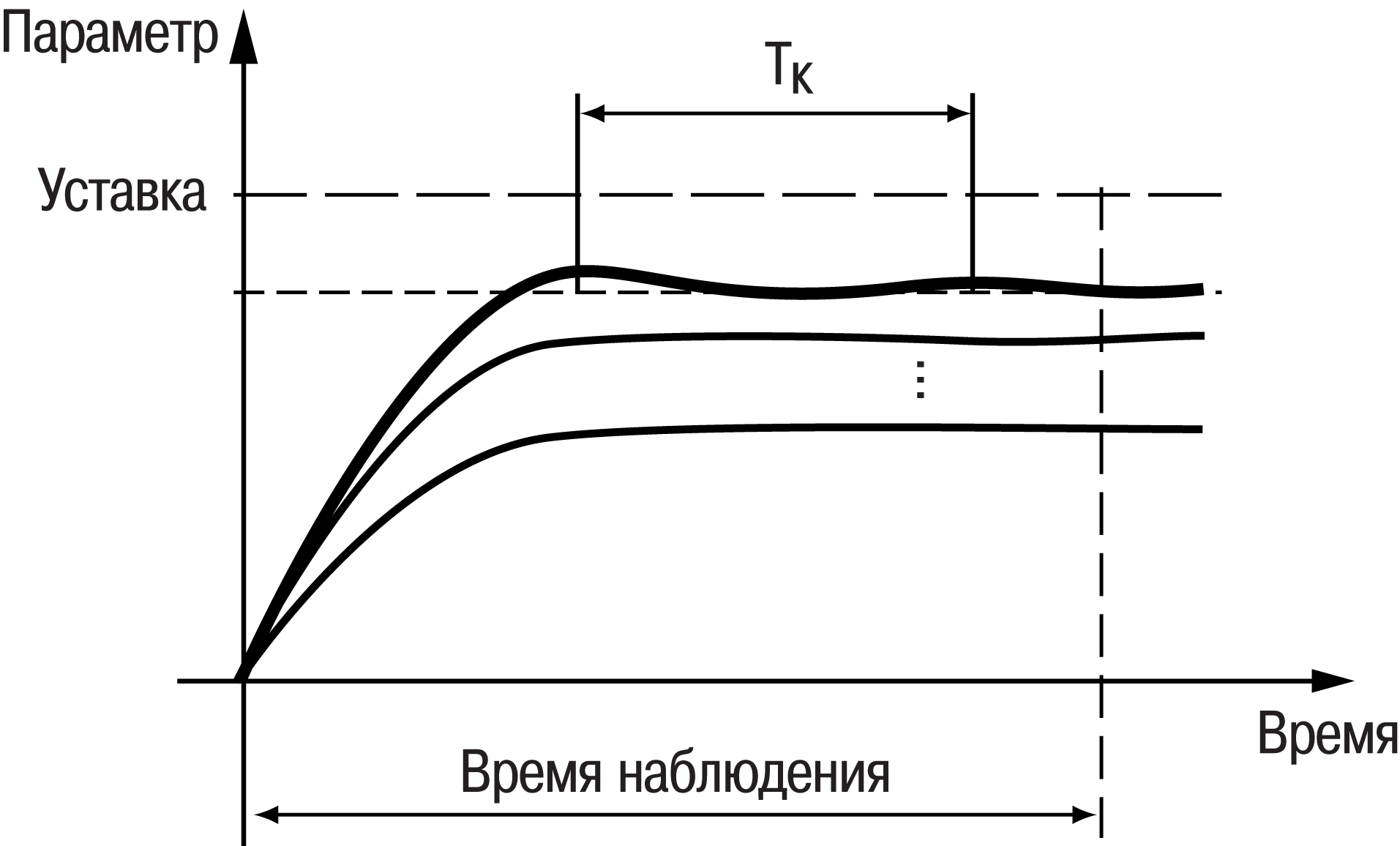 | |
| 4 | ХP = 500 τи = Тк / 2 τд = 0 | Очень быстро подходит к уставке, не пересекает, колебательность усилилась | Зафиксировать ХP , изменить τи |
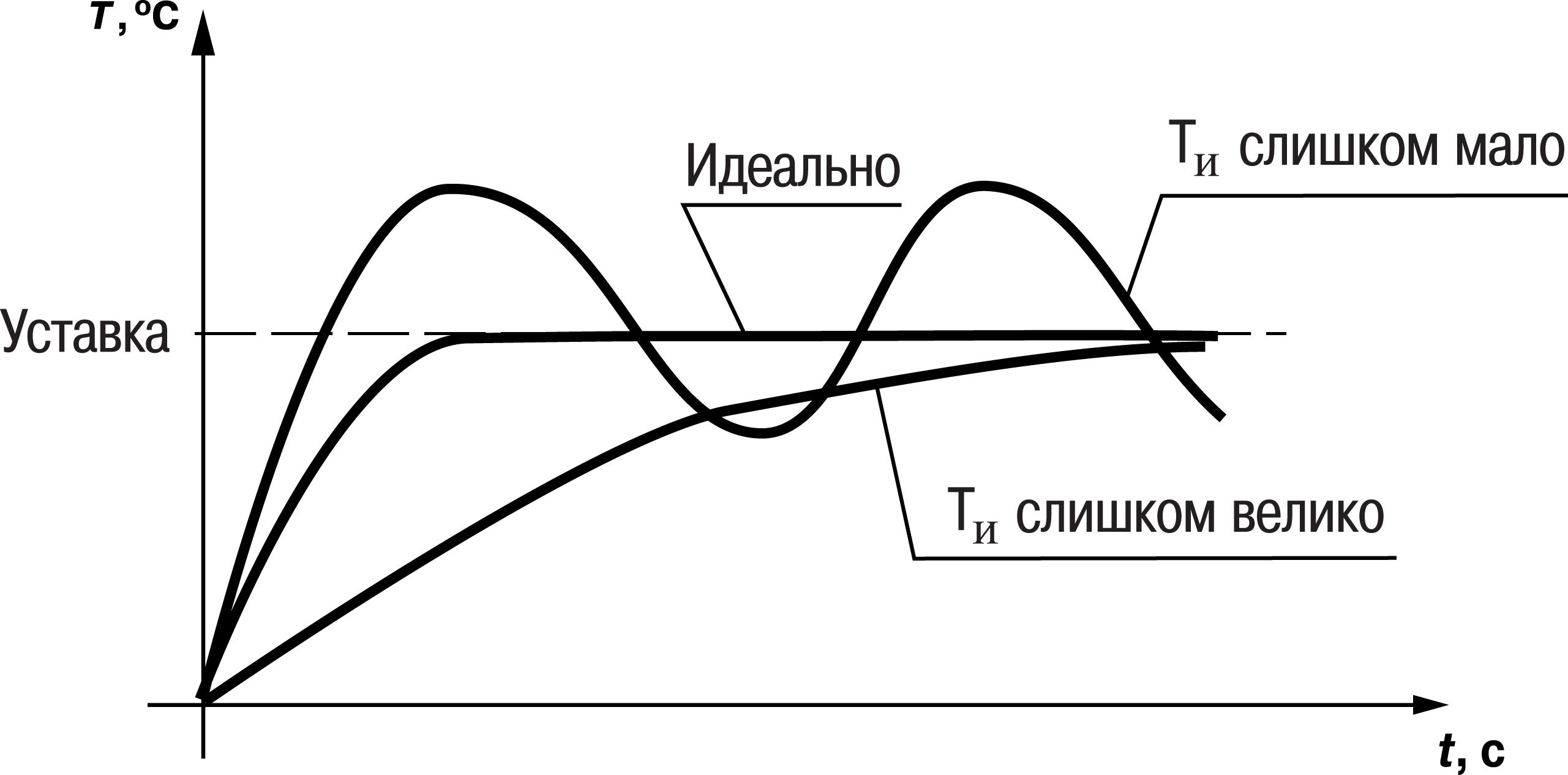
| 5 | ХP = 500 τи = 2000 τд = 0 | Подходит к уставке, не пересекает | Уменьшить τи (в два раза) |
| 6 | ХP = 500 τи = 1000 τд = 0 | Подходит к уставке, не пересекает | Уменьшить τи и ХP (в два раза) |
| 7 | Сделать несколько итераций, до тех пор, пока регулируемая величина не пересечет уставку и начнет колебания около этого значения | 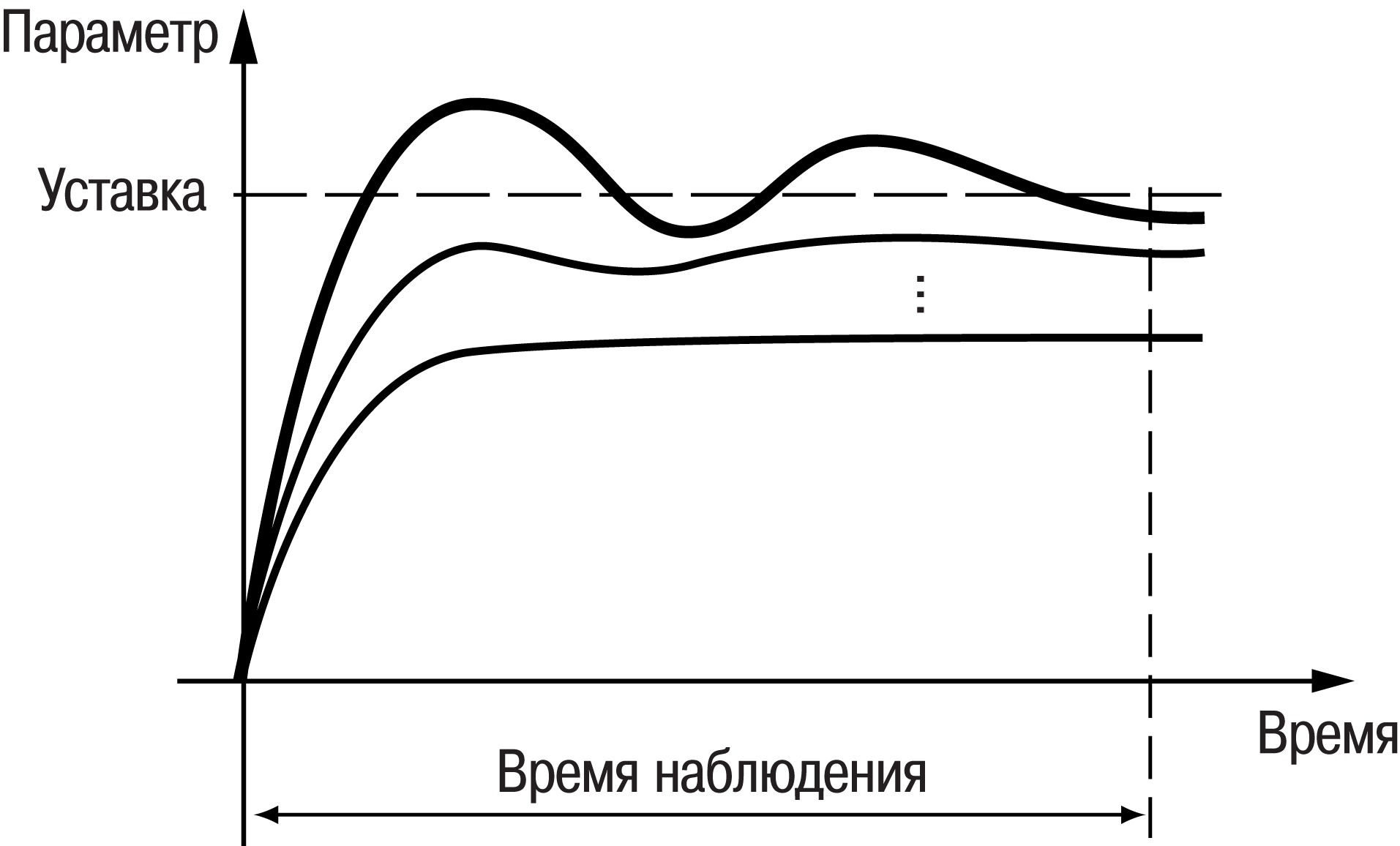 | |
| 8 | ХP = 125 τи = 250 τд = 0 | Регулируемая величина пересекла уставку. Проверить соотношение амплитуд А3 / А1 ≈ 0,1 Если колебания удовлетворяют условию – регулятор настроен. Если нет — фиксировать τи и ХP, задать τд = τи / 5 | 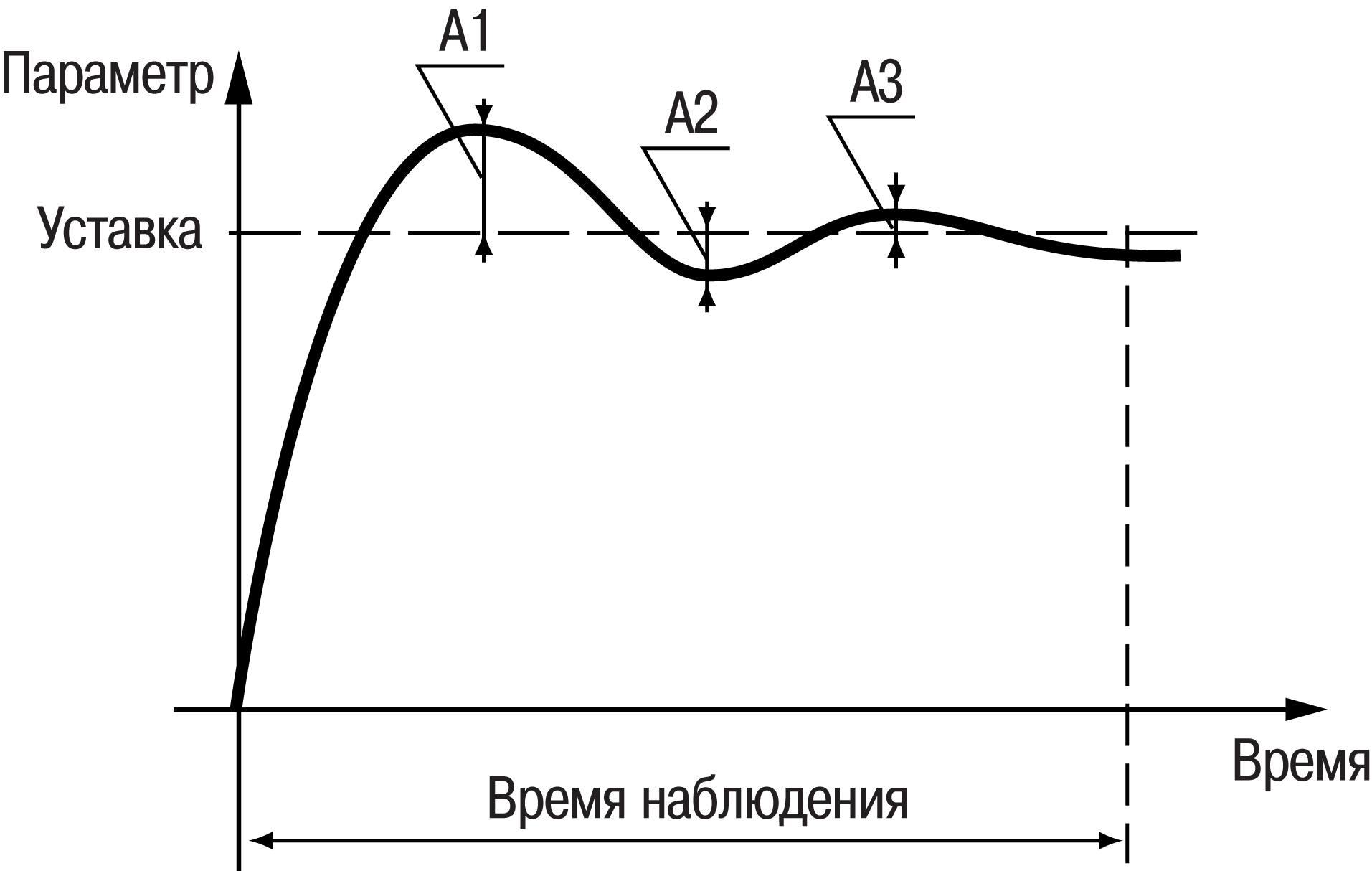 |
| 9 | ХP = 125 τи = 250 τд = 50 | Проверить соотношение амплитуд А3 / А1 ≈ 0,1 Не удовлетворяет условию — уменьшить i на 10 % | |
| 10 | ХP = 125 τи = 250 τд = 40 | Регулятор настроен | |
Настройка компаратора и устройства «LBA»
Для более эффективного контроля над процессами регулирования в приборе имеется логическое устройство, работающее по принципу компаратора, а также устройство определения обрыва контура «LВА».
Оба устройства управляют различными сигнализирующими устройствами, например, сиренами, лампами, блокировочными выключателями, блоками принудительного (аварийного) охлаждения или нагревания и т. п.
Сигналы аварийной сигнализации коммутируются через схему «ИЛИ» и могут управлять только ВУ ключевого типа.
О срабатывании логического устройства свидетельствует включение соответствующего светодиода на лицевой панели (АL или LВА).
Настройка компаратора
В зависимости от системы регулирования можно задать параметры срабатывания компаратора, сигнализирующего о выходе регулируемой величины за допустимые пределы.
При настройке компаратора следует задать тип логики его срабатывания в параметре ALt.
В приборе заложено 11 типов логики срабатывания компаратора – задается порог срабатывания компаратора Х и гистерезис HYS для устранения ненужных срабатываний из-за колебаний контролируемой величины вокруг порогового значения.
Компаратор сигнализирует об аварийной ситуации, но регулятор продолжает работать.
Функция блокировки первого срабатывания позволяет исключить включение сигнализации сразу после включения питания.
Использование блокировки имеет смысл, например, при установке в системе нагревания, поскольку, как правило, значение измеряемой величины в этой системе изначально находится ниже уставки SP.
Типы логики срабатывания компаратора
| Параметр ALT | Тип сигнализации | Состояние выходного устройства |
|---|---|---|
| 00* | Сигнализация выключена | |
| 01 | Измеренная величина выходит за заданный диапазон | 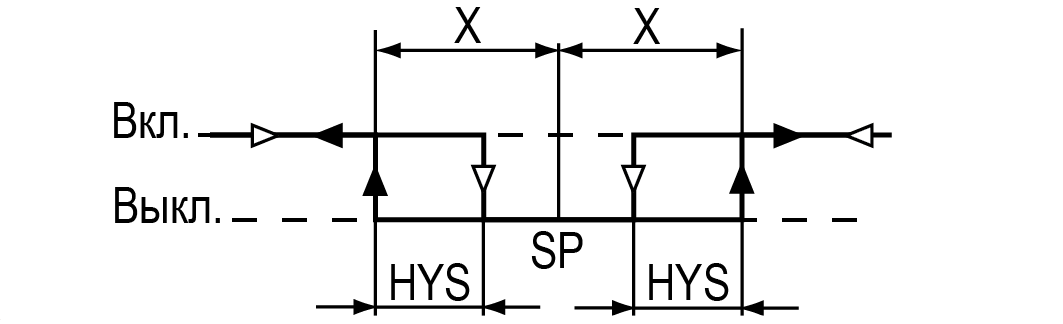 |
| 02 | Измеренная величина превышает уставку SP регулятора на X | 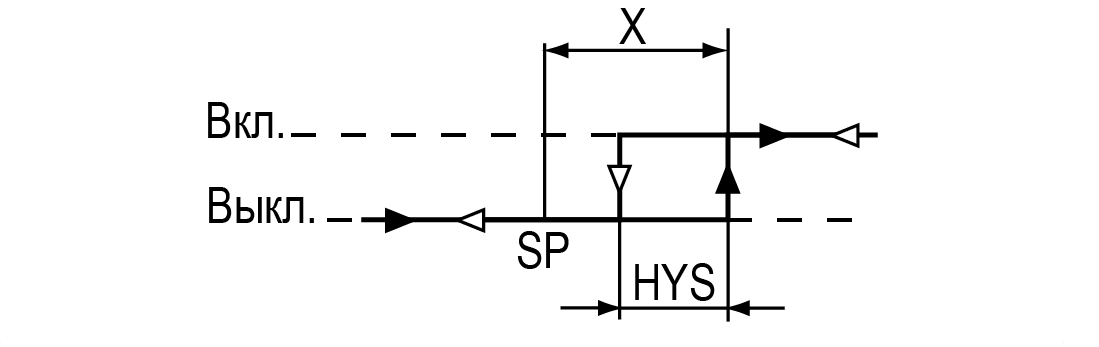 |
| 03 | Измеренная величина меньше уставки SP регулятора на X | 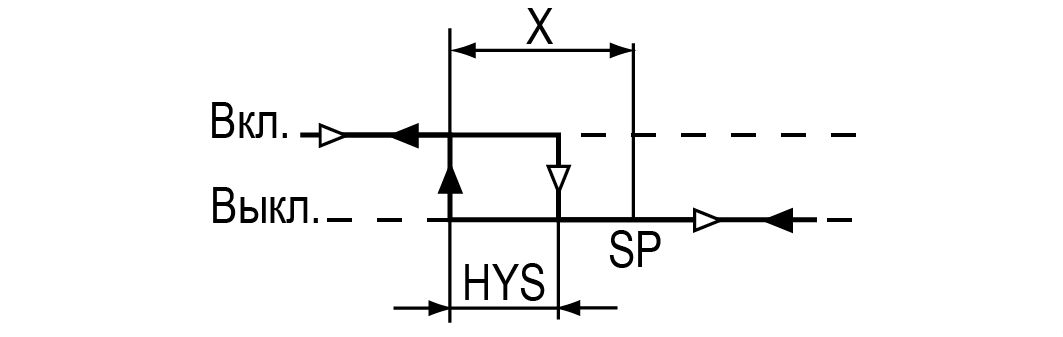 |
| 04 | Измеренная величина находится в заданном диапазоне | 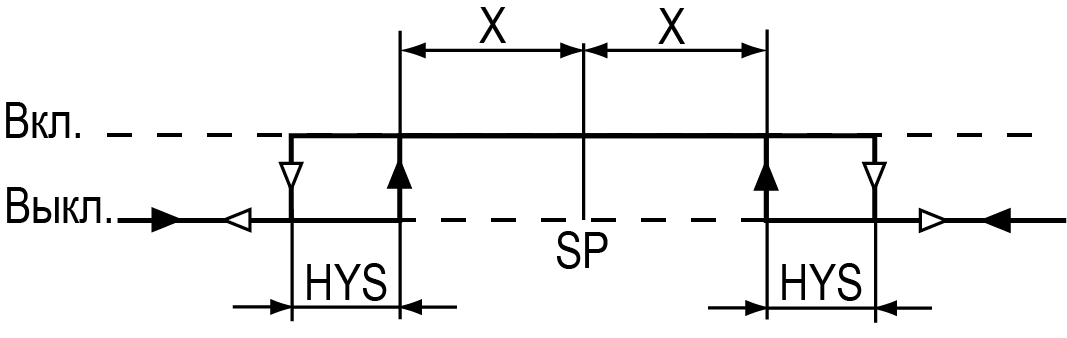 |
| 05 | Аналогично 01 с блокировкой первого срабатывания | |
| 06 | Аналогично 02 с блокировкой первого срабатывания | |
| 07 | Аналогично 03 с блокировкой первого срабатывания | |
| 08 | Измеренная величина превышает X по абсолютному значению | 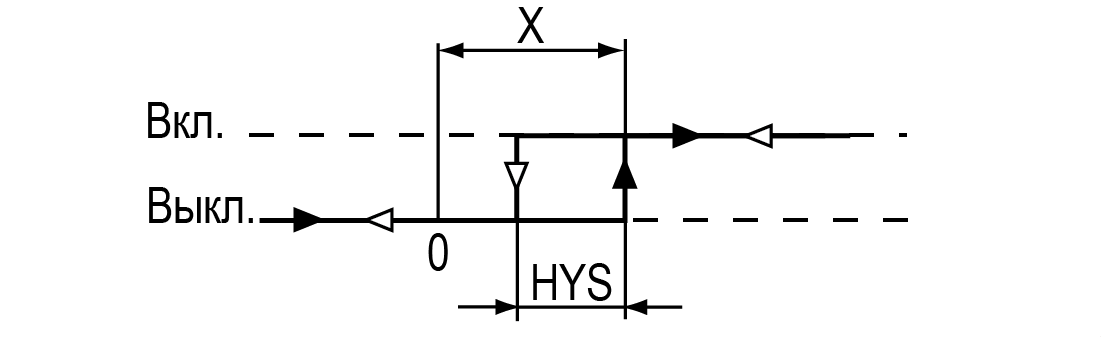 |
| 09 | Измеренная величина меньше X по абсолютному значению | 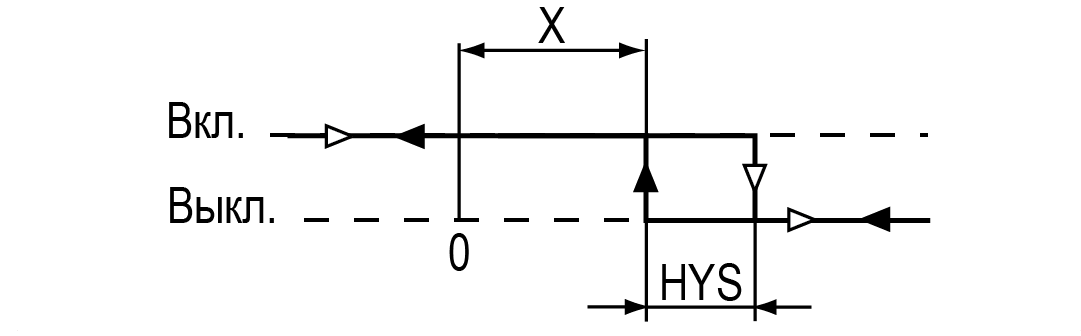 |
| 10 | Аналогично 08 с блокировкой первого срабатывания | |
| 11 | Аналогично 09 с блокировкой первого срабатывания | |
| * Заводская
установка — 00. X — порог срабатывания, параметр Al-d (группа init), HYS — гистерезис, параметр Al — H. | ||
Пример
Рассмотрим пример сигнализации с типом логики 5 в системе нагревания.
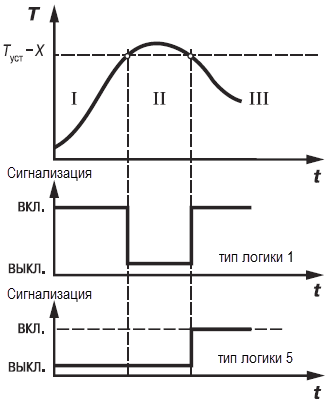
На рисунке показаны диаграммы работы компаратора без блокировки первого срабатывания (тип логики 1), и с блокировкой (тип логики 5).
В случае использования типа логики 1 в момент включения прибора, когда регулируемая величина ниже порога Туст – Х, происходит нежелательное срабатывание компаратора (зона I), когда реально аварийной ситуации нет. В случае использования типа логики 5 нежелательного срабатывания не происходит.
После включения прибора выход компаратора будет находиться в состоянии «выкл» до первого превышения порога Туст – Х, и только когда регулируемая величина снова выйдет на порог Туст – Х (этап III), выход компаратора впервые перейдет в состояние «включено» – сигнализация сработает. Далее компаратор будет работать также, как с типом логики 1.
После выбора логики срабатывания следует настроить порог срабатывания и гистерезис компаратора – параметры AL-d и AL-H соответственно.
При установке в параметре ALt значения 0 компаратор будет выключен, а параметры AL-d, AL-H недоступны.
Параметр AL-H может принимать значения в диапазоне от 0 до верхней границы диапазона измерения используемого датчика.
Параметр AL-d может принимать значения от нижней до верхней границы диапазона измерения используемого датчика.
Сигнализация об обрыве в контуре регулирования
Для задания времени диагностики обрыва контура (параметр LBA) следует перейти в группу параметров Adu.
Если значение регулируемого параметра не меняется в течение определенного времени при подаче максимального (минимального) управляющего воздействия, то в контуре регулирования произошел обрыв. Тогда на соответствующий выход выдается сигнал. Работа сигнализации об обрыве контура определяется двумя параметрами: «время диагностики обрыва контура» и «ширина зоны диагностики обрыва контура».
Устройство выдает сигнал тревоги, если по истечении времени диагностики обрыва контура измеренное значение не изменилось, а именно:
- для процесса нагрева при максимальном выходном сигнале не увеличилось, при минимальном – не уменьшилось;
- для процесса охлаждения при максимальном выходном сигнале не уменьшилось, при минимальном – не увеличилось.
После выдачи сигнала регулятор отключается.
Время диагностики обрыва контура LBA измеряется в секундах и вычисляется по методике, изложенной ниже.
Для вычисления времени диагностики обрыва контура следует:
- Установить максимальное значение выходного сигнала.
- Измерить время, за которое измеряемая величина изменится на ширину зоны диагностики (по умолчанию ширина этой зоны равна 10).
- Увеличить измеренное время вдвое и принять его за время диагностики обрыва контура.
Если LBA = 0, сигнализация обрыва контура отключается, параметр LBAb недоступен.
Ширина зоны диагностики обрыва контура задается в параметре LBAb в единицах измерения входной величины в диапазоне 0,0...999,9 для температурных датчиков (ТС и ТП) и 0...9999 – для аналоговых.
Пример срабатывания устройства диагностики обрыва контура приведен на рисунке.
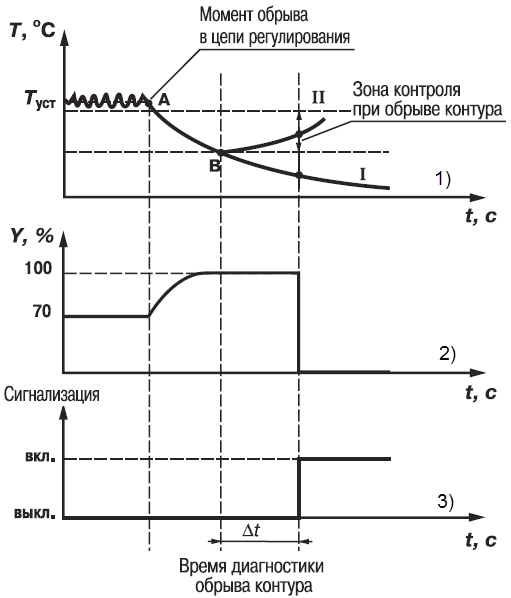
В точке А нагреватель вышел из строя, и температура начинает уменьшаться. Регулятор увеличивает выходной сигнал (график 2), контролируя отклик системы. Поскольку температура продолжает уменьшаться, рассогласование растет и значение Y достигает 100 %. В момент достижения Y = 100 % (точка В) прибор начинает отсчет времени диагностики обрыва контура Δt.
Если по истечении этого времени температура продолжает уменьшаться, сигнализация срабатывает (кривая I на графике 1). Если температура растет, но за время Δt изменение температуры не превысило ширину зоны диагностики обрыва контура (кривая II на графике 1), сигнализация также срабатывает (график 3).
Об аварийной ситуации сигнализирует свечение светодиода LBA.
Защита отдельных параметров от просмотра и изменений
Каждый параметр прибора имеет атрибут редактирования, установка которого производится с ПК через интерфейс RS-485. Атрибут редактирования принимает два значения: редактируемый и нередактируемый.
Параметр EDPT, находящийся в группе SECR прибора (доступ к группе осуществляется через код PASS=100), управляет возможностью просмотра и редактирования параметров с учетом установленных атрибутов.
В случае, когда EDPT = ON, все параметры, в которых атрибут редактирования принимает значение нередактируемый, становятся невидимыми.
В случае, когда EDPT = OFF, все параметры, независимо от значения атрибута редактирования, будут видимыми.
Если в группе все параметры невидимы, то вся группа становится невидимой.
Настройка обмена данными через интерфейс RS-485
Обмен данными настраивается параметрами группы COMM:
- bPS – скорость обмена в сети; допустимые значения – 2400, 4800, 9600, 14400,19200, 28800, 38400, 57600, 115200 бит/с;
- A.LEn – длина сетевого адреса (8 или 11 бит);
- Addr – базовый адрес прибора (0-2047);
- rSdL – задержка при ответе по RS-485 (1-45 мc).
Прибор имеет также следующие фиксированные параметры обмена, не отображаемые на цифровом индикаторе:
- Количество стоп-бит – 1 – Sbit;
- Длина слова данных – 8 бит – LEn;
- Контроль четности – нет – PrtY.
Работа с параметрами по протоколу ОВЕН
Каждый параметр имеет имя, состоящее из латинских букв (до четырех), которые могут быть разделены точками, и название. Например: «Длина сетевого адреса A.Len», где «Длина сетевого адреса» – название, A.Len – имя.
Параметры прибора разделяются на две группы: настраиваемые и оперативные.
Настраиваемые параметры следует задавать либо кнопками на лицевой панели прибора, либо через сетевой интерфейс с помощью программы «Конфигуратор».
Значения настраиваемых параметров хранятся в энергонезависимой памяти прибора и сохраняются в случае выключения питания.
Настраиваемые параметры могут иметь также индекс – цифру, отличающую параметры однотипных элементов. Индекс передается вместе со значением параметра.
Оперативные параметры переносят информацию о текущем состоянии прибора или объекта регулирования: измеренные или вычисленные значения, выходные мощности регуляторов, номера запущенных в данный момент программ, текущие состояния выходных элементов и т. д.
Оперативные параметры индексируются через сетевой адрес. Для считывания измеряемого значения с входа 1 следует прочитать значение параметра PV с сетевым адресом, заданным в параметре Addr, для считывания измеряемого значения с входа 2 – с сетевым адресом Addr +1.
Восстановление заводских установок
В приборе имеется функция восстановления значений параметров, установленных
на заводе-изготовителе (см. Приложение Настраиваемые
параметры). Для этого следует отключить прибор от сети как
минимум на 1 минуту и, одновременно удерживая кнопки и , включить питание прибора. При
появлении на верхнем индикаторе [– – – –] отпустить кнопки.
Заводские установки восстановлены.