Последовательность настройки
Настройка прибора предназначена для задания и записи настраиваемых параметров в энергонезависимую память прибора.
Прибор имеет два уровня настройки.
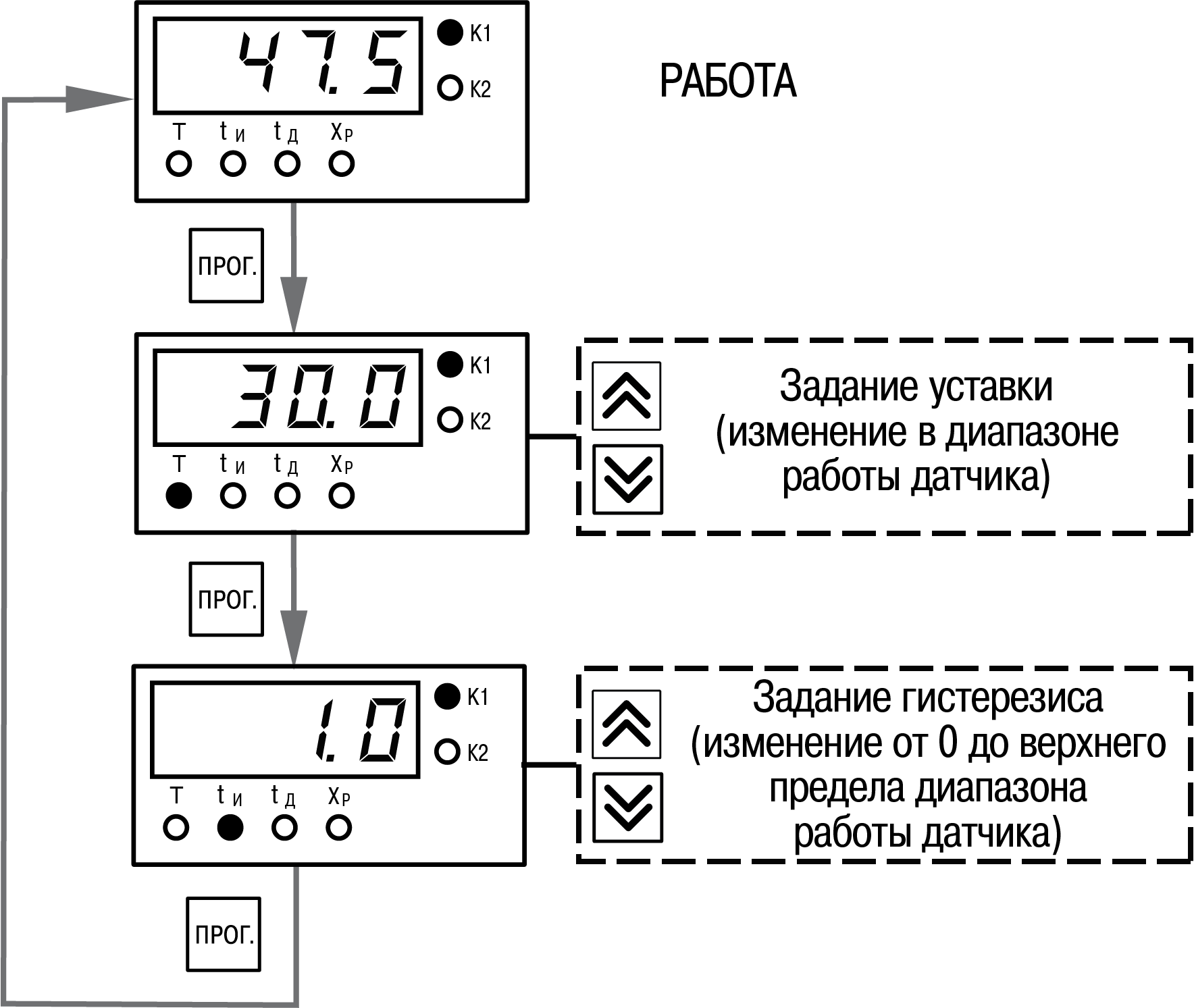
На первом уровне осуществляется просмотр и изменение значений параметров регулирования:
- уставки Т;
- коэффициентов ПИД-регулятора Хр, tи, tд.
Для доступа к параметрам настройки следует нажать кнопку  .
.
Если в течение 20 секунд при настройке не производится операций с кнопками, прибор автоматически возвращается к работе.
Последовательность работы с прибором на этом уровне настройки приведена на рисунке.
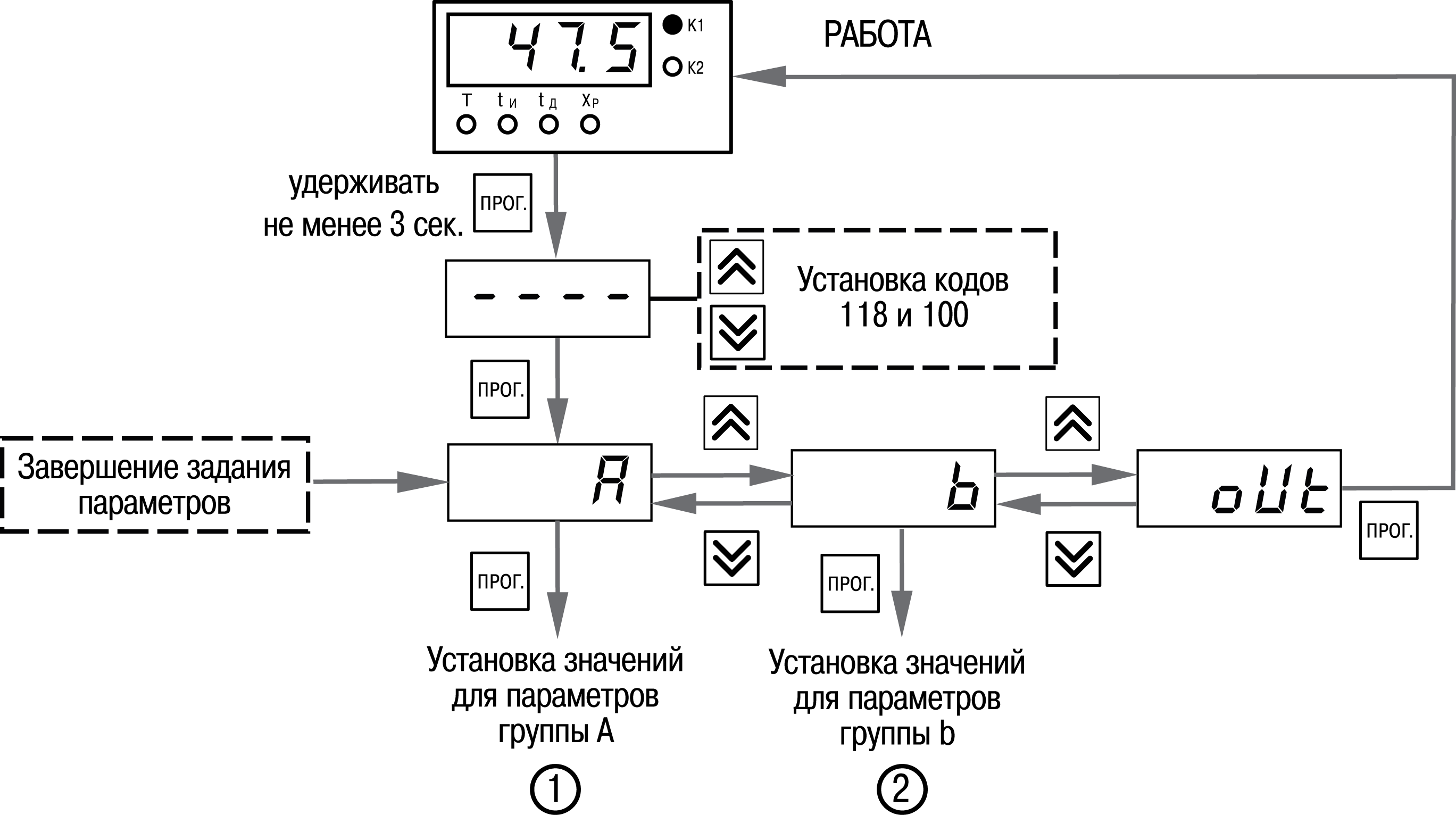
На втором уровне настройки осуществляется просмотр и необходимое изменение функциональных параметров прибора. Функциональные параметры прибора разделены на группы:
- группа А (параметры, определяющие логику работы прибора);
- группа b (параметры, отвечающие за настройку измерительной части прибора).
Для входа на второй уровень настройки следует нажать и удерживать
кнопку не
менее 3 секунды.
Последовательности процедуры настройки прибора на втором уровне для обеих групп параметров приведены на рисунках ниже.
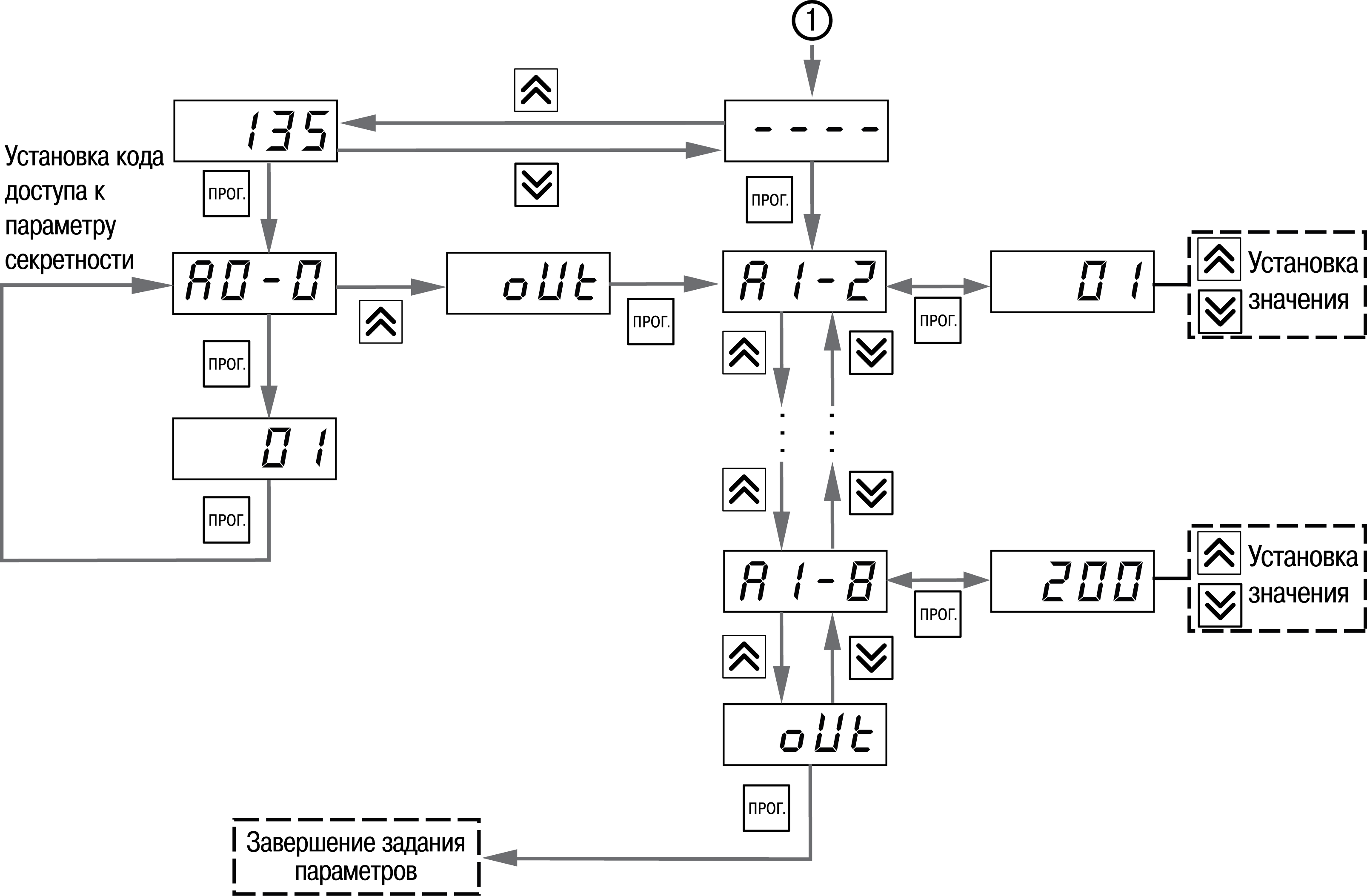
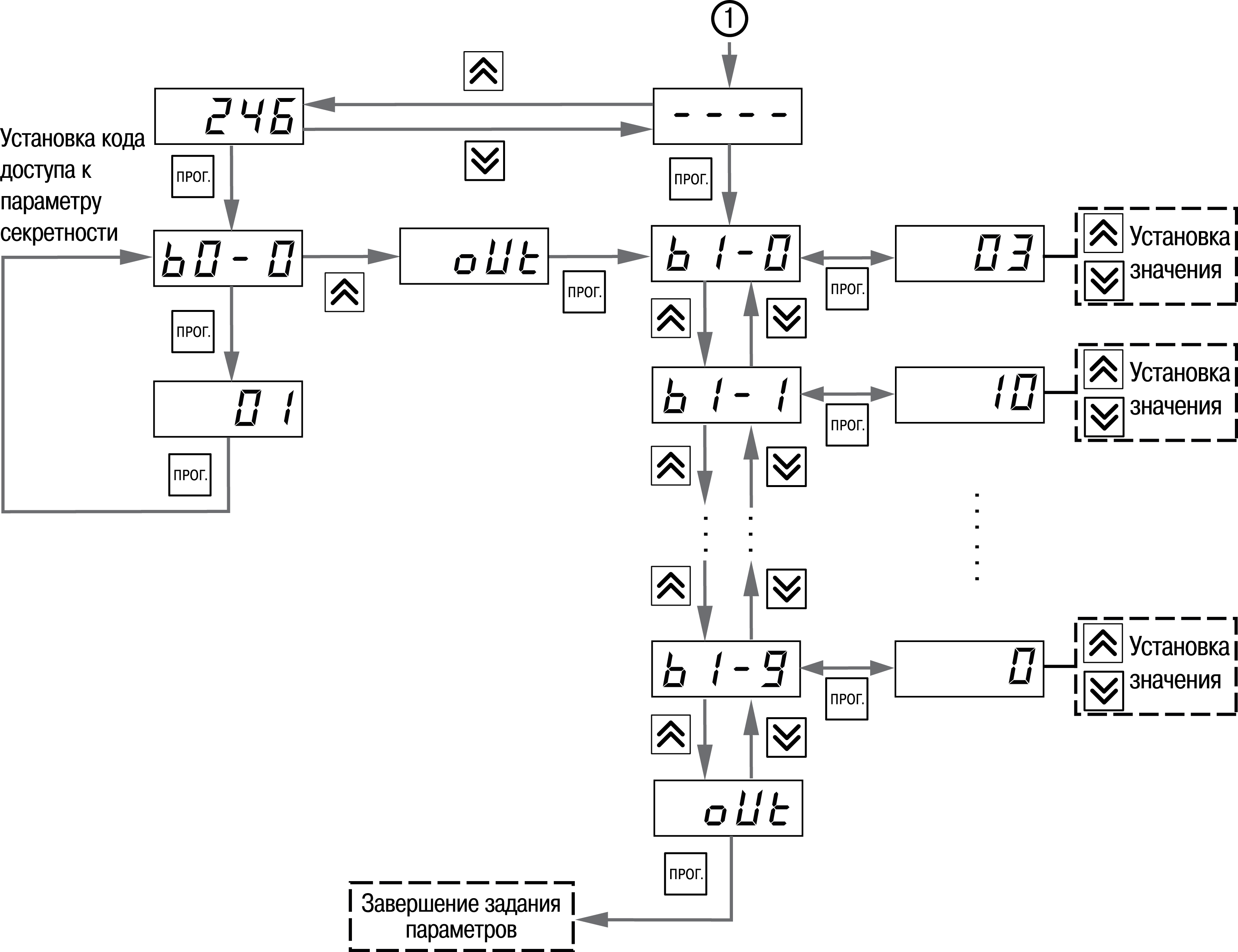
Для защиты параметров от несанкционированного изменения служат параметры секретности А0-0 и b0-0. В них устанавливается запрет на изменение параметров соответствующей группы и параметров регулирования. При установленном запрете разрешается только просмотр ранее заданных значений параметров этих групп.
Настройка цифровой фильтрации измерений
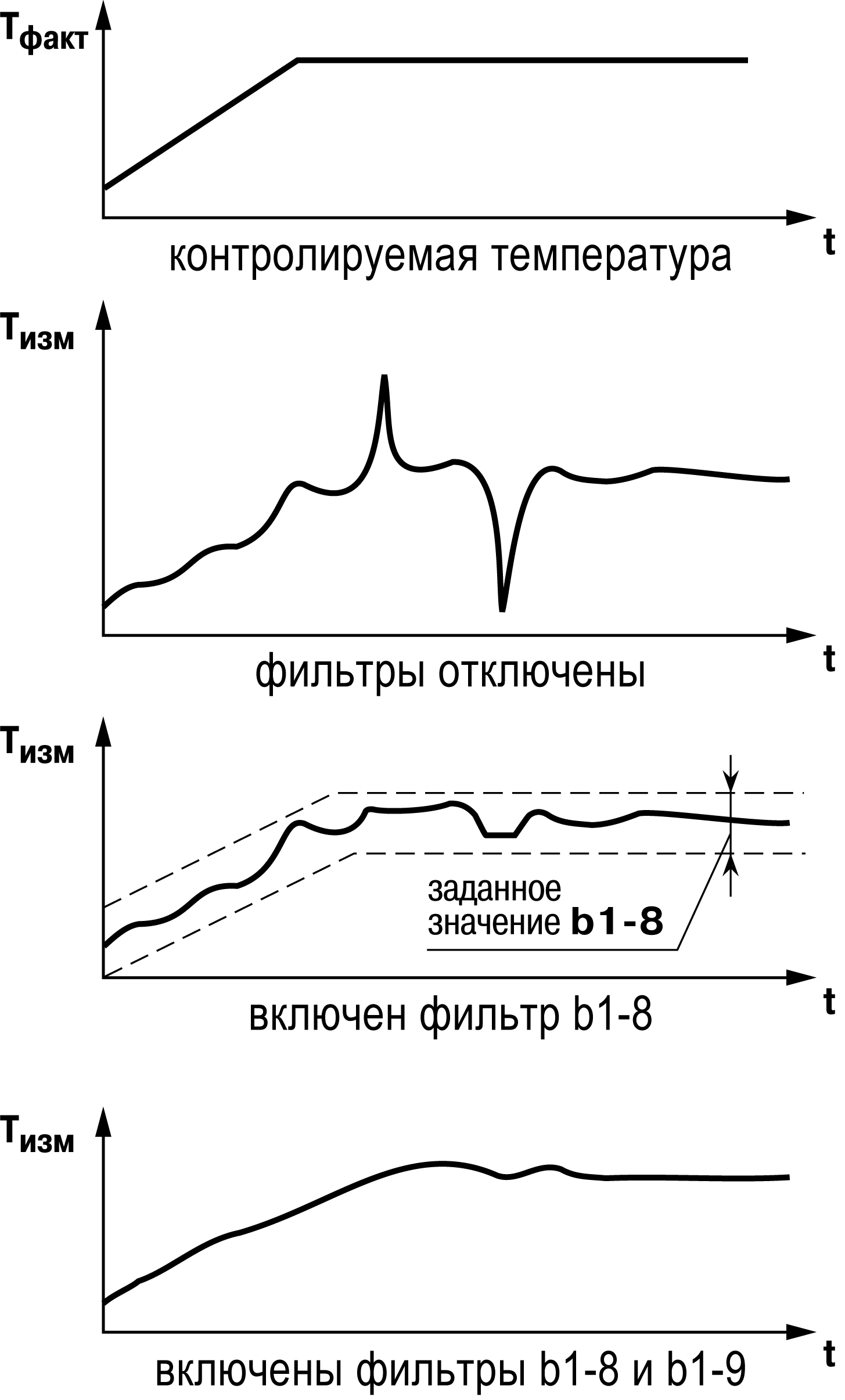
Для дополнительной защиты от электромагнитных помех в приборе предусмотрен программный цифровой фильтр низких частот. Цифровая фильтрация проводится в два этапа.
На первом этапе фильтрации из текущих измерений входных параметров отфильтровываются значения, имеющие явно выраженные «провалы» или «выбросы». Для этого прибор вычисляет разность между результатами измерений входной величины, выполненных в двух последних циклах опроса, и сравнивает ее с заданным значением, называемым полосой фильтра. Если вычисленная разность превышает заданный предел, то производится повторное измерение, полученный результат отбрасывается, а значение полосы фильтра удваивается. В случае подтверждения нового значения фильтр перестраивается (т.е. полоса фильтра уменьшается до исходной) на новое стабильное состояние измеряемой величины. Такой алгоритм позволяет защитить прибор от воздействия единичных импульсных и коммутационных помех, возникающих на производстве при работе силового оборудования.
На втором этапе фильтрации осуществляется сглаживание (демпфирование)
сигнала с целью устранения шумовых составляющих. Основной характеристикой
сглаживающего фильтра является «постоянная времени фильтра» – интервал,
в течение которого изменение выходного сигнала фильтра достигает значения
Коррекция измерительной характеристики датчиков
Для устранения начальной погрешности преобразования входных сигналов, измеренное прибором значение может быть откорректировано. В приборе есть два типа коррекции, позволяющие осуществлять сдвиг или наклон характеристики на заданную величину.
При подключении ТС по двухпроводной схеме следует выполнять коррекцию сдвиг характеристики в обязательном порядке. Определение значения параметра сдвиг характеристики производится по методике, приведенной в разделе.
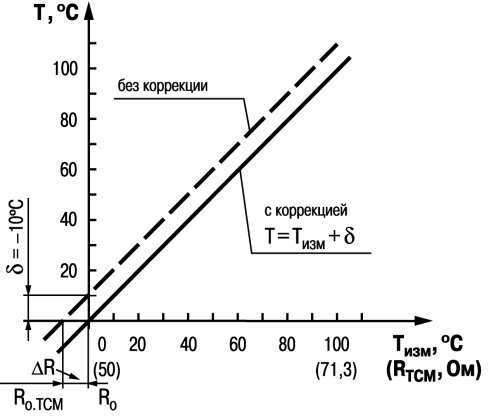
Сдвиг характеристики применяется
- для компенсации погрешностей, вносимых сопротивлением подводящих проводов при использовании двухпроводной схемы подключения ТС,
- при отклонении у ТС значения R0.
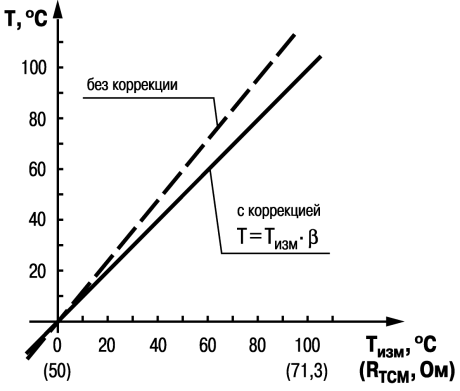
Изменение наклона характеристики осуществляется путем умножения
измеренной (и скорректированной «сдвигом», если эта коррекция необходима)
величины на поправочный коэффициент β, значение которого задается
параметром b1-2. Пример изменения наклона измерительной
характеристики графически представлен на рисунке. Данный вид коррекции используется, как
правило, для компенсации погрешностей самих датчиков (например, при
отклонении у термометров сопротивления параметра α от стандартного
значения) или погрешностей, связанных с разбросом сопротивлений шунтирующих
резисторов (при работе с преобразователями, выходным сигналом которых
является ток). Значение поправочного коэффициента β задается в безразмерных
единицах в диапазоне от

где
Пфакт – фактическое значение контролируемой входной величины;
Пизм – измеренное прибором значение той же величины.
Определить необходимость введения поправочного коэффициента можно, измерив максимальное или близкое к нему значение параметра, где отклонение наклона измерительной характеристики наиболее заметно.
Настройка вычисления квадратного корня
Данная функция предназначена для датчиков с выходным сигналом, пропорциональным квадрату измеряемого сигнала.
Для включения/выключения вычислителя необходимо установить соответствующее значение параметра b1-3. Вычисление квадратного корня T с учетом настроек масштабирования происходит по следующей формуле:

где
Пн – заданное нижнее значение границы диапазона измерения (b1-5);
Пв – заданное верхнее значение границы диапазона измерения (b1-6);
Iх – значение сигнала с датчика в относительных единицах
от
Настройка ПИД-регулятора
Общие сведения
На рисунке приведена функциональная схема ПИД-регулятора. Основное назначение регулятора – формирование управляющего сигнала Y, задающего выходную мощность ИМ и направленного на уменьшение рассогласования Е или отклонения текущего значения регулируемой величины Т от величины уставки Туст.
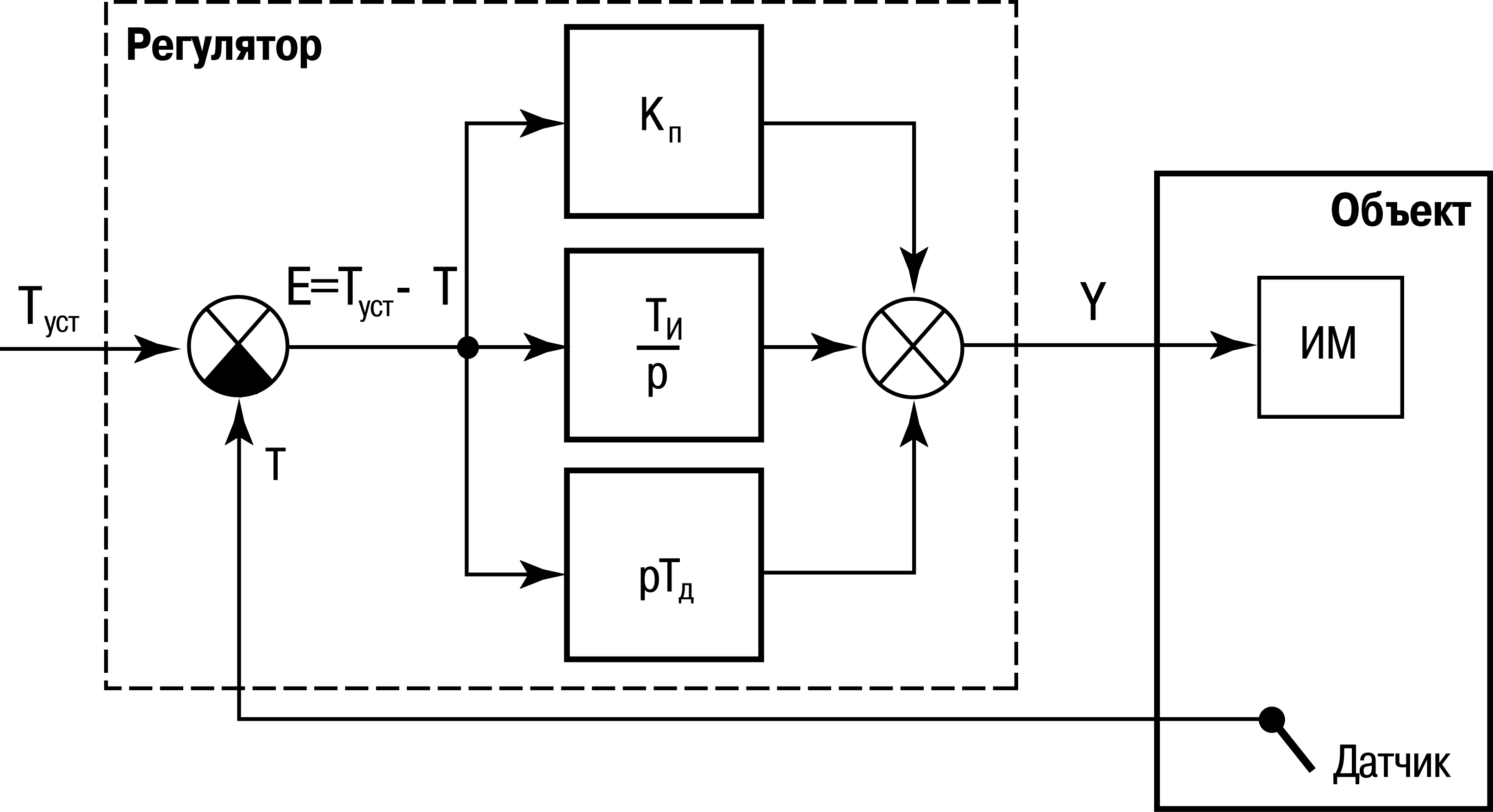
В операторной форме формула ПИД-регулятора выглядит следующим образом:

где Кп – пропорциональная составляющая;
1 / (р · Ти) – интегральная составляющая;
р · Тд – дифференциальная составляющая.
На практике, для создания цифровых регуляторов используются разностные формулы, позволяющие работать не с непрерывным во времени сигналом, а с дискретным по времени.
Поэтому для расчета управляющего сигнала на выходе цифрового ПИД-регулятора используется формула:

где Xp – полоса пропорциональности (Xp = 1 / Кп);
Ei – рассогласование или разность между уставкой Туст и текущим значением измеренной величины Тi;
τд – дифференциальная постоянная;
ΔEi – разность между двумя соседними рассогласованиями Ei и Ei–1;
Δtизм – время между двумя соседними измерениями Ti и Ti–1;
τи – интегральная постоянная;
 – накопленная
в i-й момент времени сумма рассогласований (интегральная сумма).
– накопленная
в i-й момент времени сумма рассогласований (интегральная сумма).
Пропорциональная составляющая зависит от рассогласования Ei и отвечает за реакцию на мгновенную ошибку регулирования.
Интегральная составляющая содержит в себе накопленную ошибку регулирования  и позволяет добиться
максимальной скорости достижения уставки.
и позволяет добиться
максимальной скорости достижения уставки.
Дифференциальная составляющая зависит от скорости изменения рассогласования и позволяет улучшить
качество переходного процесса.
и позволяет улучшить
качество переходного процесса.
Время между соседними измерениями Δtизм определяется временем опроса одного канала измерения.
Параметры настройки регулятора
Для эффективной работы конкретного объекта управления необходимо подобрать коэффициенты ПИД-регулятора: Хр, τи и τд. Для этого в приборе предусмотрен следующий функционал:
- автонастройка ПИД-регулятора;
- ручная настройка.
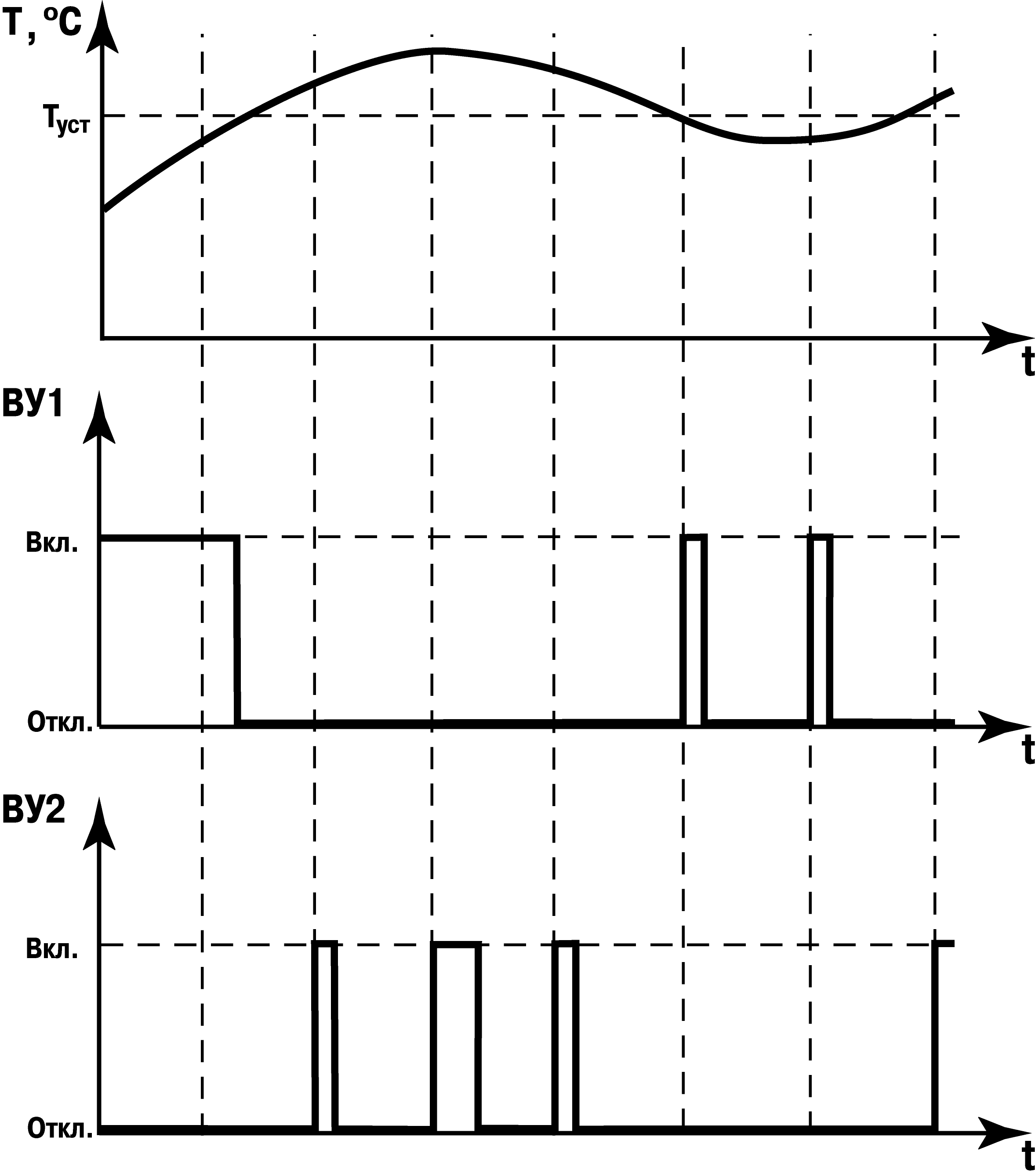
Для управления исполнительным механизмом прибор использует оба ВУ, см. рисунок.
Выбор ВУ определяется следующим условием:
- если Y > 0 – включается ВУ1;
- если Y < 0 – включается ВУ2.
ВУ1 управляет нагревателем в системе «нагреватель-холодильник» или контактами «открыть» в системе КЗР, а ВУ2 — холодильником или контактами «закрыть».
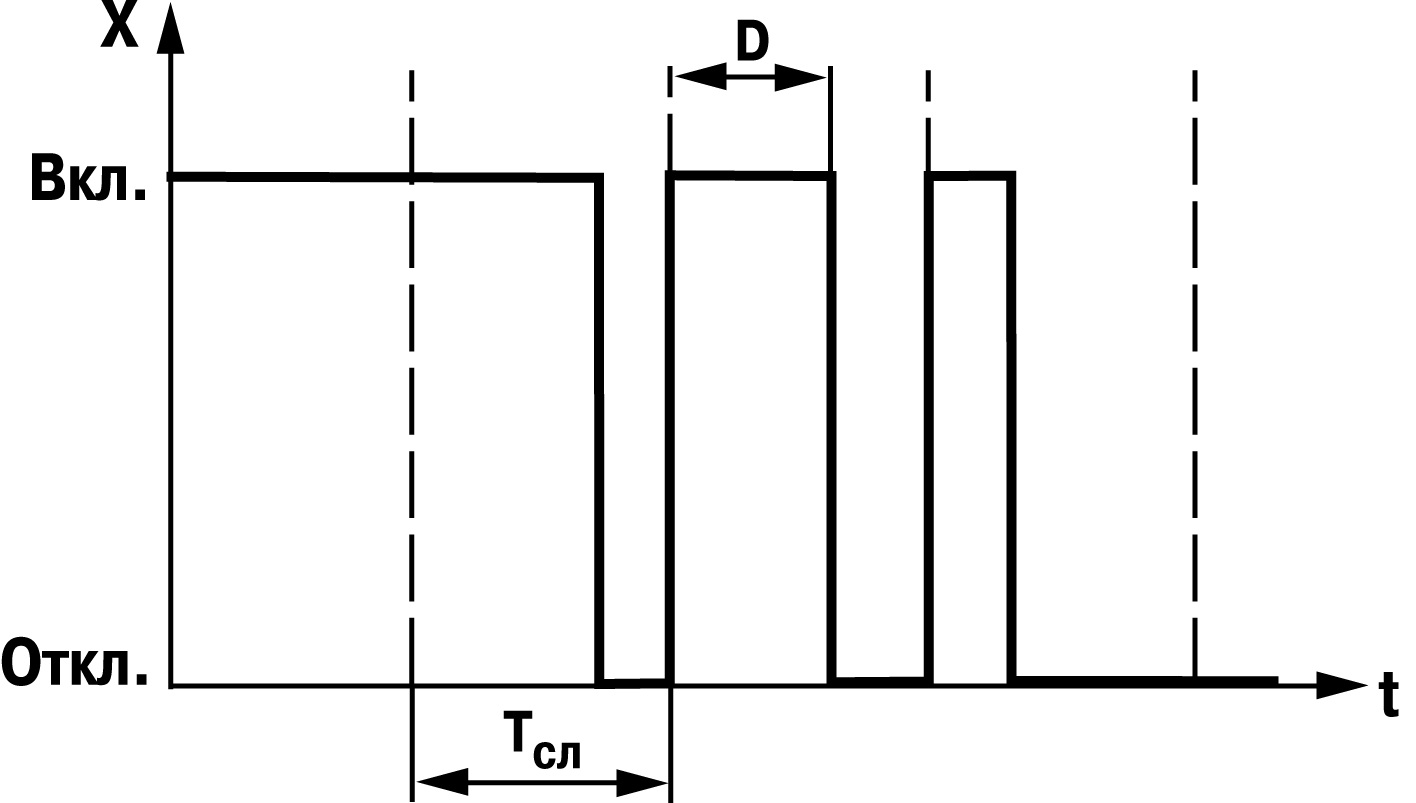
Для формирования управляющего сигнала регулятора выходной сигнал ВУ преобразуется в последовательность импульсов согласно следующей формуле:

где
D – длительность импульса, с;
Тсл - период следования импульсов, с;
Y – сигнал на выходе ПИД-регулятора, [%].
Период следования импульсов Тсл зависит от параметров пускового оборудования исполнительного механизма и задается параметром А1-5.
В зависимости от встроенного дискретного ВУ, необходимо установить минимальную длительность импульса ШИМ, которая задается параметром А1-8.
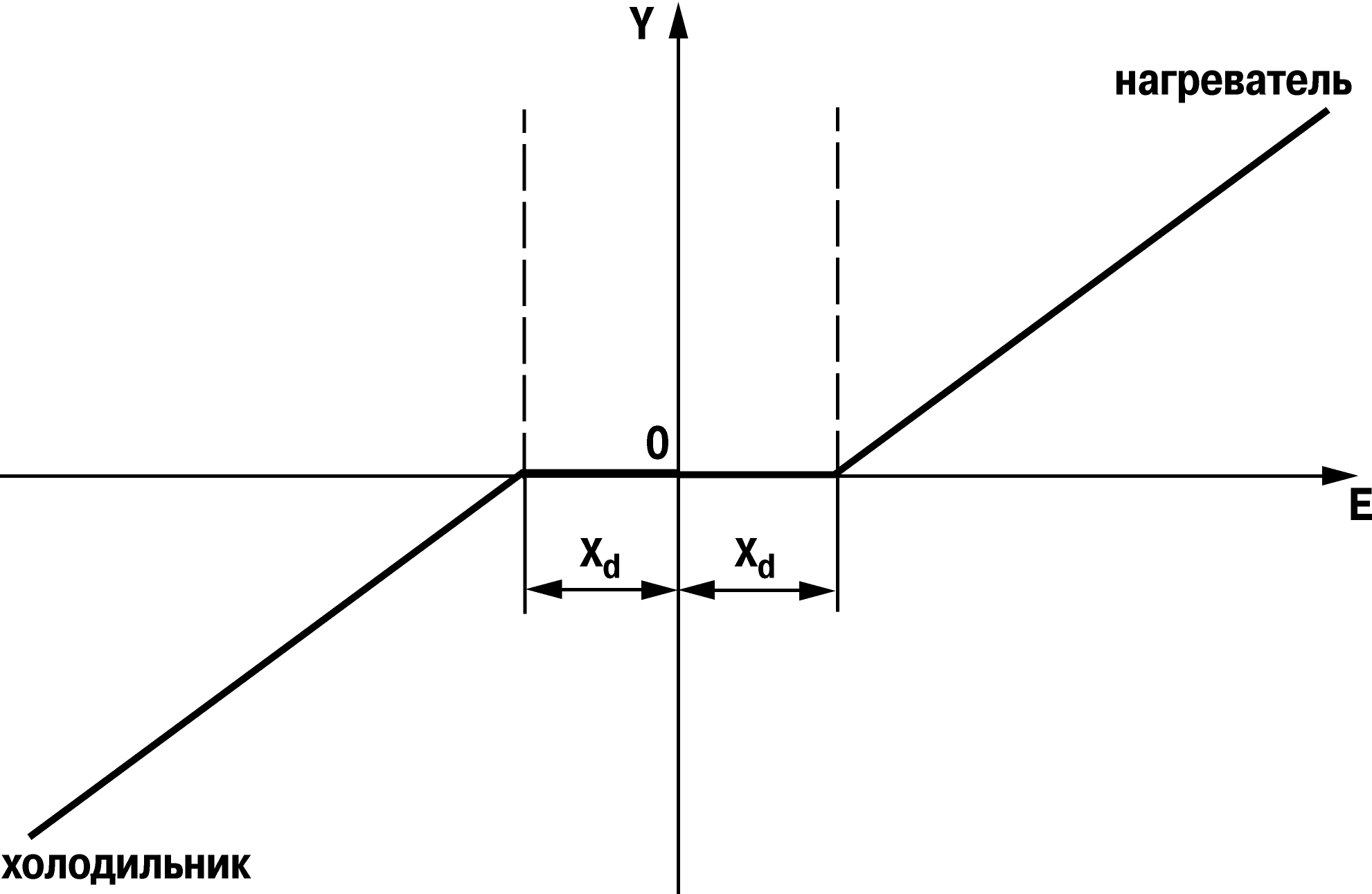
Чтобы исключить излишние срабатывания регулятора при небольшом значении рассогласования Ei для вычисления значений Yi используется уточненное значение EР, которое вычисляется в соответствии с условиями:
если | Ei | < Xd, то EР = 0;
если Ei >Xd, то EР = Ei – Xd;
если Ei < – Xd, то EР = Ei + Xd;
где
Xd – зона нечувствительности (рисунок).
Зона нечувствительности задается параметром А1-2.
В случае необходимости можно ограничить максимальную мощность ИМ с помощью функции ограничения управляющего воздействия (рисунок).
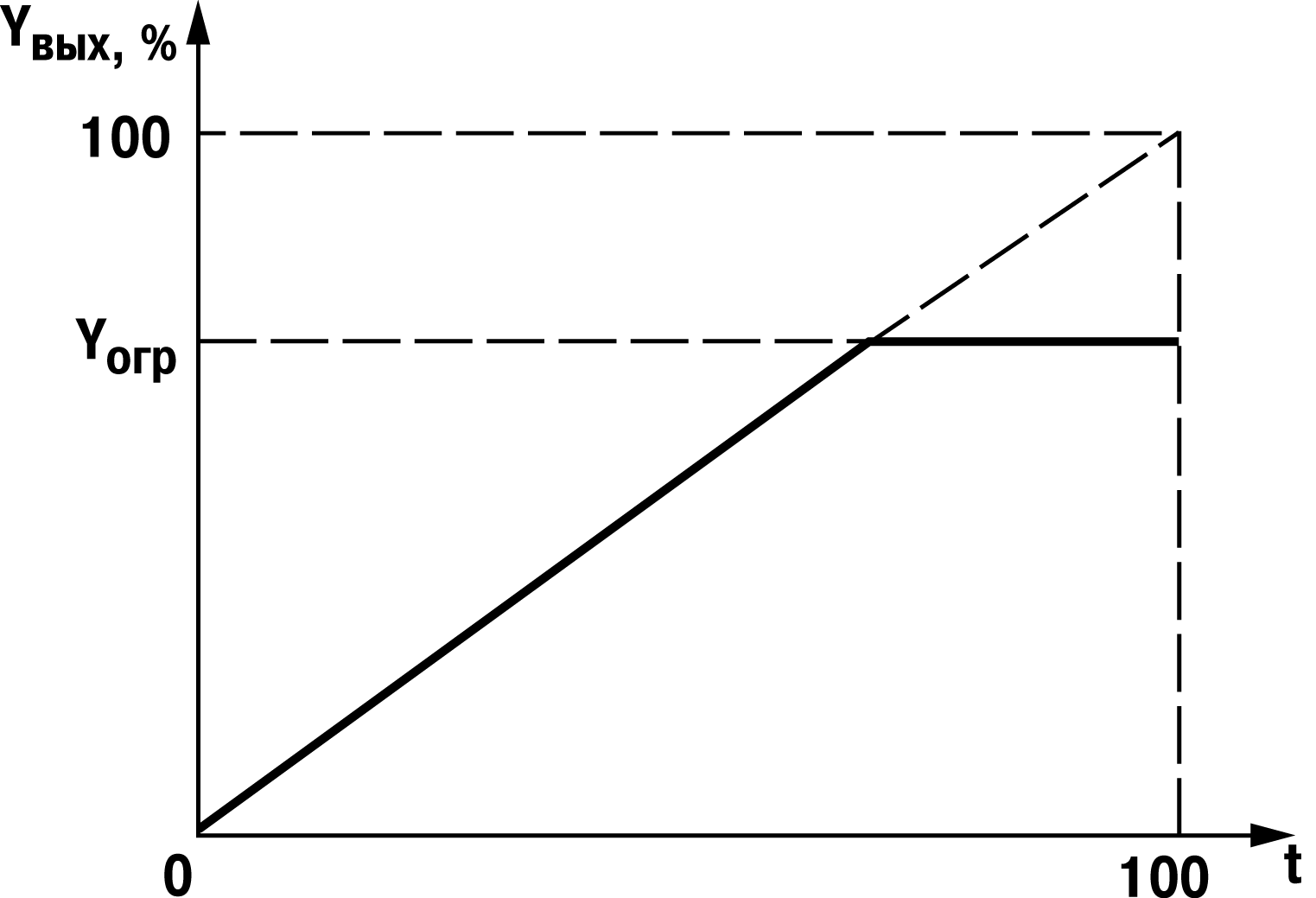
К примеру, чтобы мощность ИМ не превышала 80 %, следует выставить соответствующее значение в параметре А1-3.
- период ШИМ (параметр А1‑5);
- режим работы регулятора (параметр А1-6);
- минимальную длительность импульса ШИМ (параметр А1-8).
Если после автоматической или ручной настройки переходная характеристика объекта отличается от оптимальной (по величине допустимых отклонений и скорости выхода на уставку), необходимо откорректировать заданные параметры регулирования.
Автоматическая настройка ПИД-регулятора
Автоматическая настройка ПИД-регулятора (АНР) предназначена для определения его параметров, путем анализа реакции объекта регулирования на возмущающее воздействие. Процесс автоматической настройки проходит непосредственно на объекте. Для этого следует предварительно сконфигурировать прибор с подключенными к нему датчиками и ИМ. Условия, в которых проводится АНР, должны быть максимально приближены к реальным условиям эксплуатации объекта. Рекомендуется выставить значение уставки, максимально приближенное к рабочей.
Автоматическая настройка состоит из двух последовательных этапов «раскачивания» объекта регулирования в области уставки в пределах (Туст + 2) и (Туст - 2) путем подачи максимального управляющего воздействия. Процесс АНР приведен на рисунке.
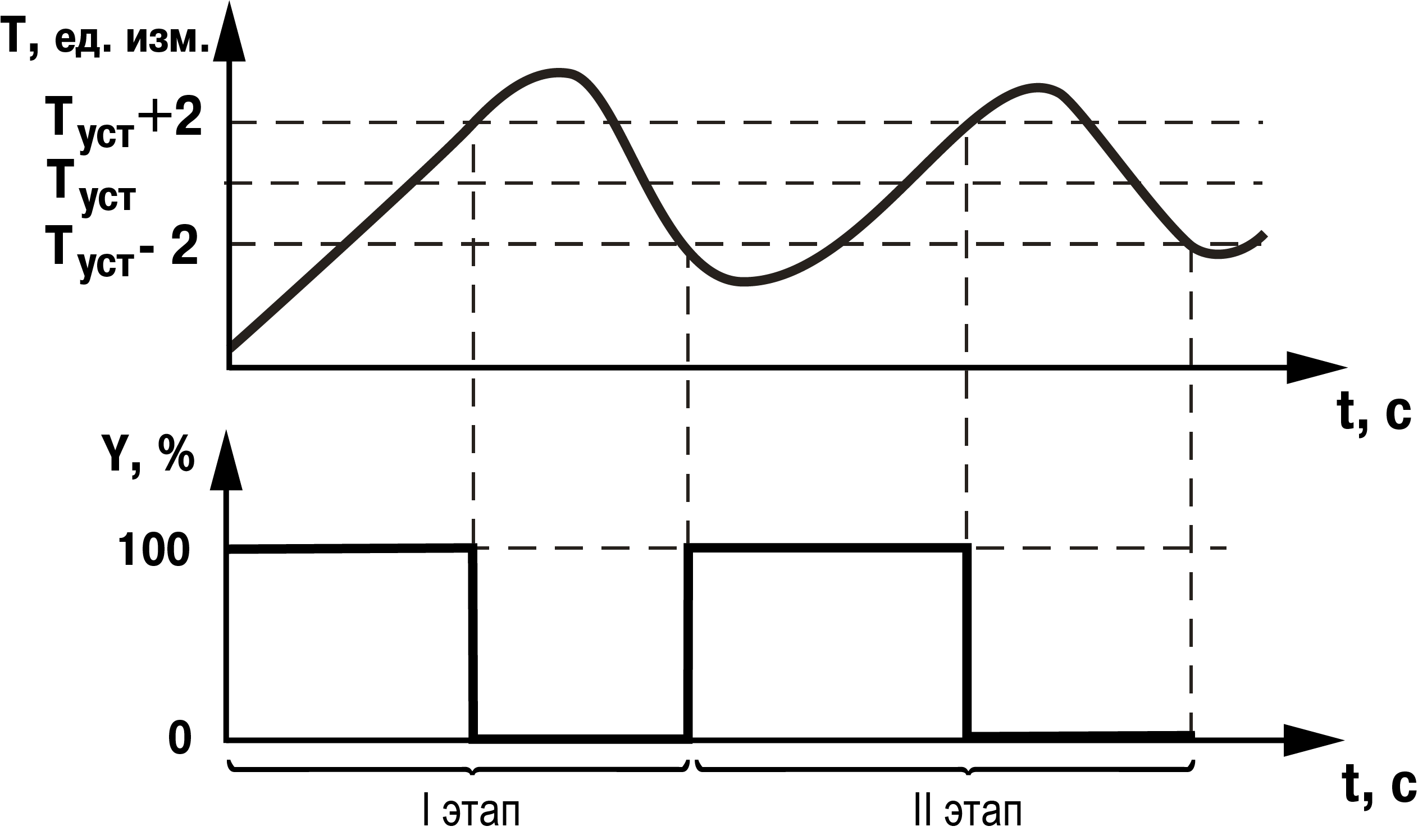
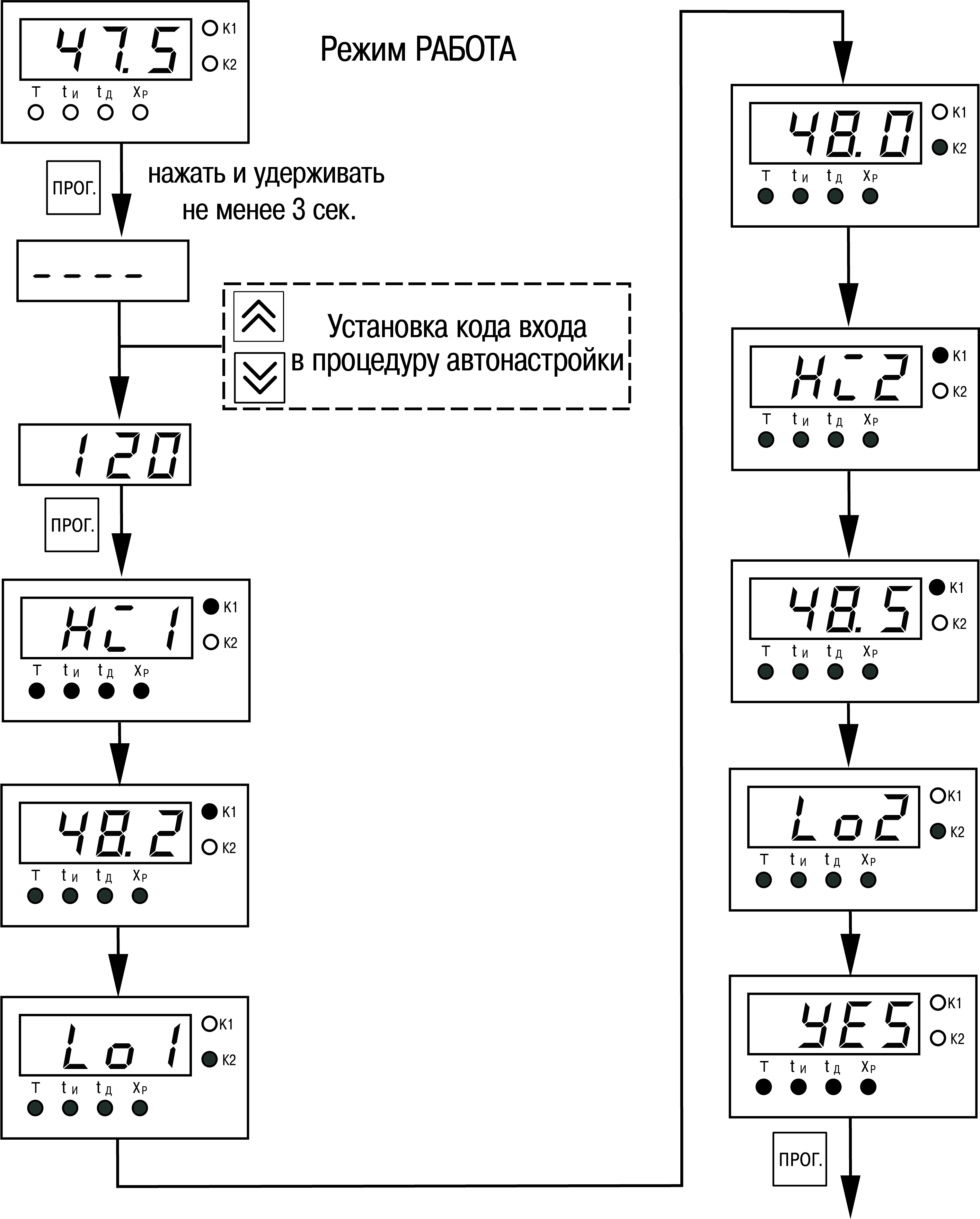
Для запуска АНР необходимо выполнить операции, указанные на рисунке.
В процессе выполнения автоматической настройки прибор попеременно индицирует этап, на котором находится АНР, и текущее значение регулируемого параметра. По завершению автоматической настройки все рассчитанные параметры ПИД-регулятора сохраняются в энергонезависимой памяти прибора, а выходные устройства выключаются.
Ручная подстройка ПИД-регулятора
Ручная подстройка осуществляется итерационным методом с оценкой процесса по двум показателям:
- наличию колебаний;
- наличию перехода графика регулируемой величины через уставку.
В ряде случаев данные действия не могут обеспечить качественную настройку ПИД-регуляторов:
- системы с непрогнозируемыми внешними возмущающими воздействиями;
- системы с разнородными нагрузками (например, ГВС днем и вечером).
В зависимости от показателей корректировка параметров осуществляется по рекомендациям:
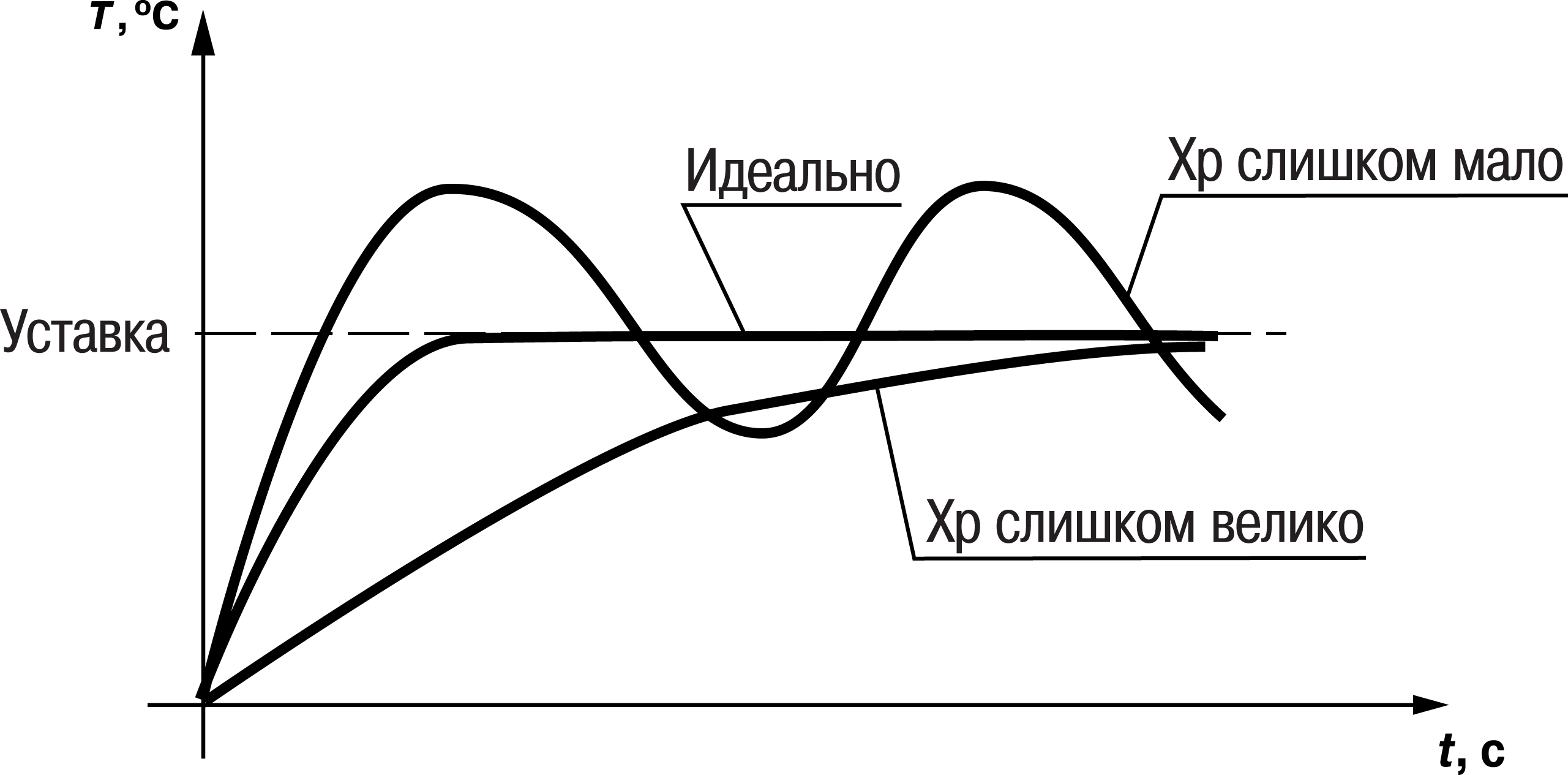
- Увеличение параметра Кп (уменьшение Xp) способствует увеличению быстродействия регулятора. Однако амплитуда колебаний регулируемой величины может возрасти до недопустимого уровня.
- Уменьшение Кп (увеличение Xp) способствует уменьшению колебаний регулируемой величины, вплоть до исчезновения. Однако при этом ухудшается быстродействие регулятора и повышается вероятность колебаний регулируемой величины..
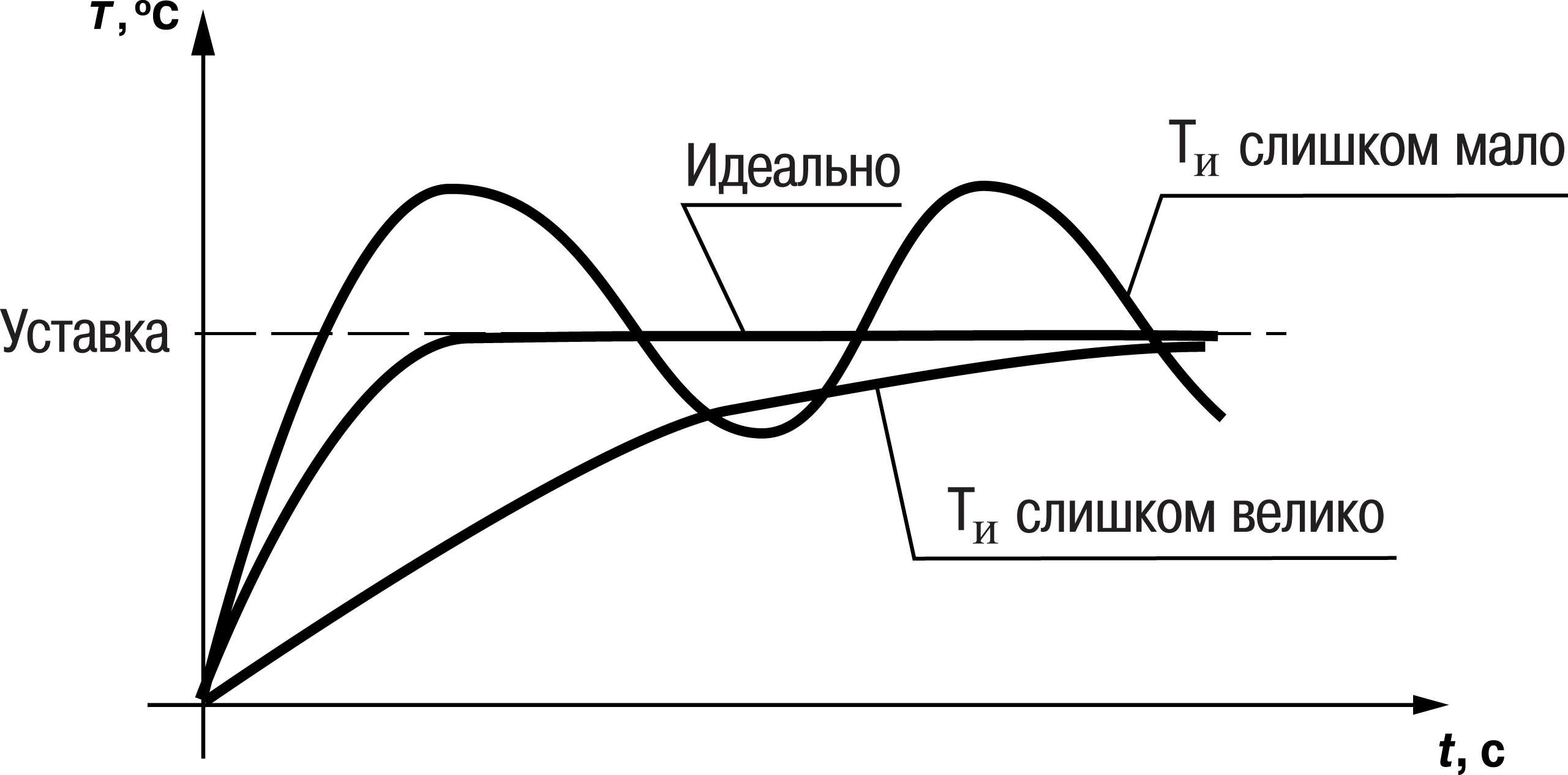
- При завышенном значении Ти процесс подхода регулируемой величины к уставке становится односторонним даже при наличии колебаний. При этом быстродействие регулятора уменьшается.
- При заниженном значении Ти появляется значительный переход регулируемой величины через уставку. Однако при этом существенно ухудшается быстродействие регулятора и повышается вероятность колебаний регулируемой величины.
- Увеличение Тд способствует повышению быстродействия системы. Однако при этом повышается ее чувствительность к помехам и возможно появление высокочастотных колебаний регулируемой величины с малым периодом.
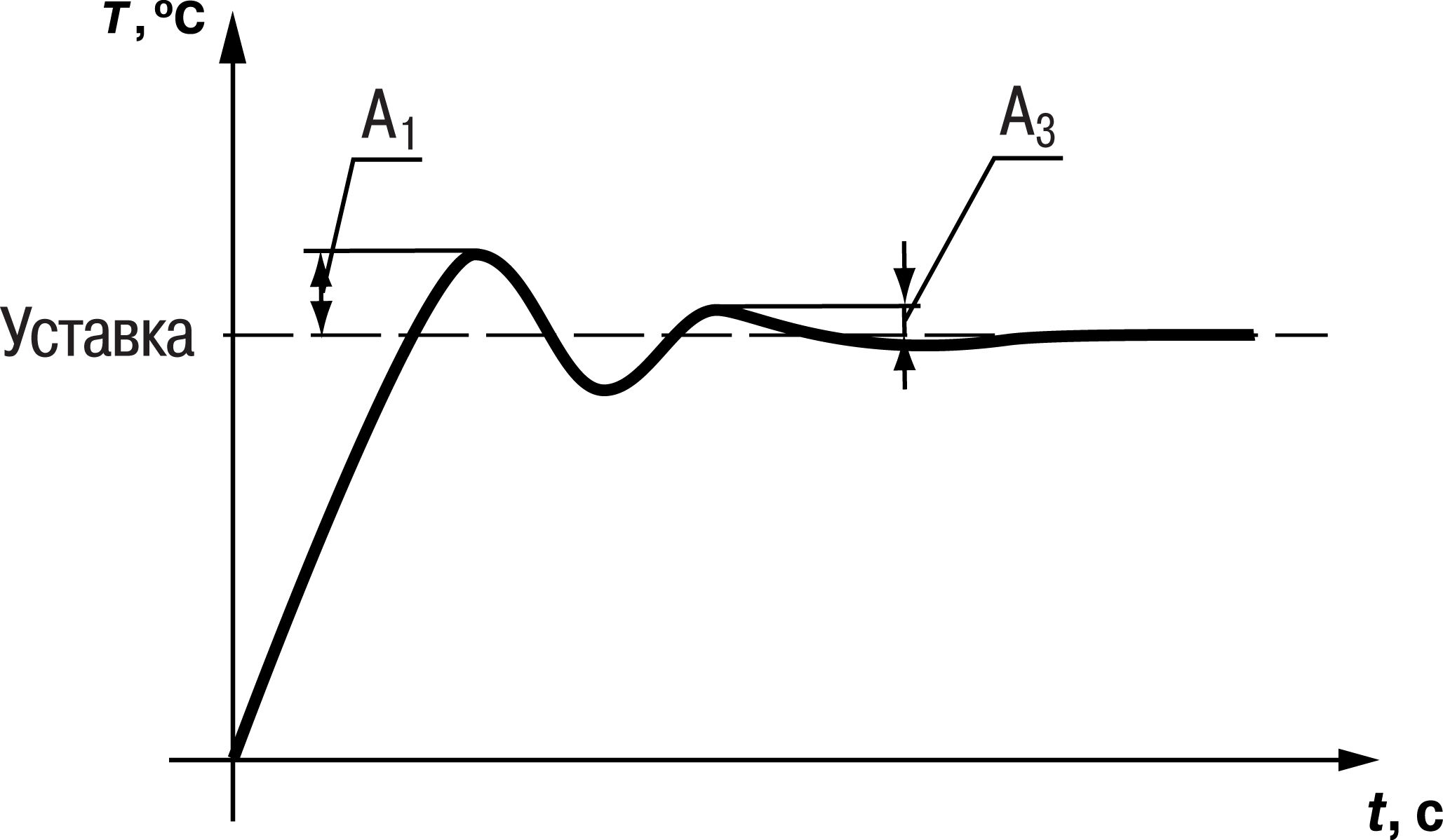
При оптимальной подстройке регулятора график регулируемой величины должен иметь минимальное значение показателя ошибки регулирования (А1) при достаточно степени затухания φ = 1 – А3/А1 (0,8 … 0,9).